#include <math.h>
#include <drawstuff/drawstuff.h>
#include <ode/ode.h>
#include <iostream>
#include <typeinfo>
#include <vector>
#include <list>
#include "exceptions.h"
#include "odehandle.h"
#include "oderobot.h"
#include <selforg/configurable.h>
#include <selforg/Position.h>
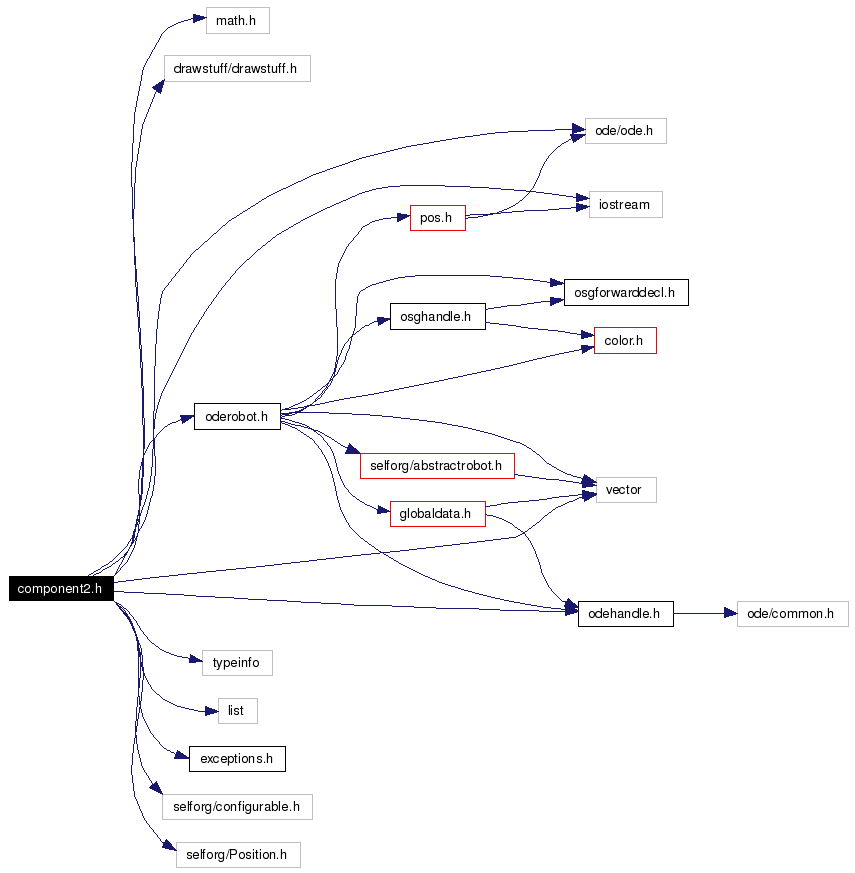
Include dependency graph for component2.h:
Go to the source code of this file.
Namespaces | |
| namespace | university_of_leipzig |
| namespace | university_of_leipzig::robots |
Classes | |
| struct | Wire |
| class | OdeObject |
| class | IComponent |
| Component. More... | |
| class | AbstractComponent |
| AbstractComponent. More... | |
| class | AbstractCompoundComponent |
| AbstractCompoundComponent. More... | |
| class | SimplePhysicalComponent |
| SimplePhysicalComponent. More... | |
| class | AbstractMotorComponent |
| AbstractMotorComponent. More... | |
| class | MotorWire |
| class | UniversalMotorComponent |
| UniversalMotorComponent. More... | |
| class | RobotArmDescription |
| class | CCURobotArmComponent |
| RobotArmComponent. More... | |
| class | PlaneComponentDescription |
| class | SpiderDescription |
| class | SpiderComponent |
Typedefs | |
| typedef Position | university_of_leipzig::robots::Angle |
| typedef std::list< Angle > | university_of_leipzig::robots::AngleList |
| typedef std::list< IComponent * > | university_of_leipzig::robots::ComponentList |
| typedef std::list< Wire * > | university_of_leipzig::robots::WireList |
 1.4.5
1.4.5