#include <sphererobot3masses.h>
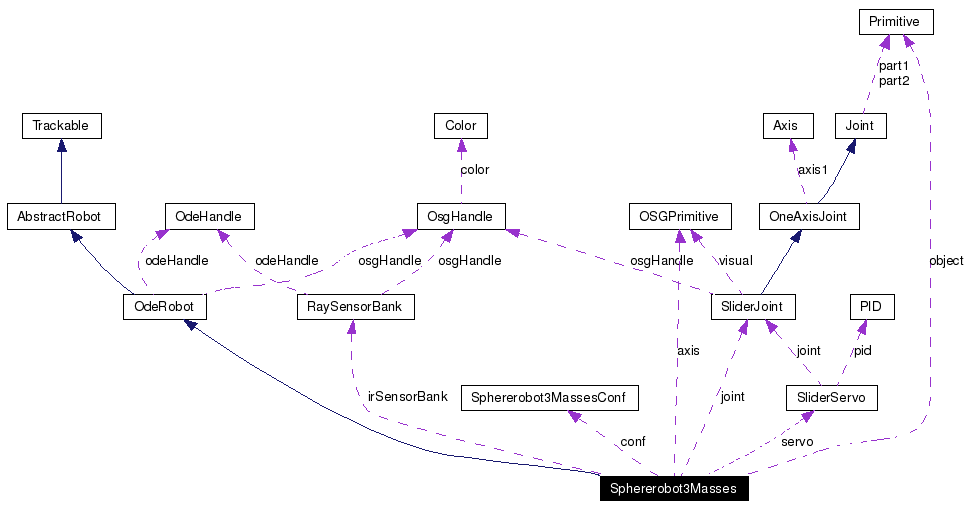
Inheritance diagram for Sphererobot3Masses:
Definition at line 87 of file sphererobot3masses.h.
Public Types | |
| enum | objects { Base, Pendular1, Pendular2, Pendular3, Last } |
Public Member Functions | |
| Sphererobot3Masses (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Sphererobot3MassesConf &conf, const char *name, double transparency=0.5) | |
| constructor | |
| virtual | ~Sphererobot3Masses () |
| virtual void | update () |
| update all primitives and joints | |
| virtual void | place (const osg::Matrix &pose) |
| sets the pose of the vehicle | |
| virtual bool | collisionCallback (void *data, dGeomID o1, dGeomID o2) |
| This is the collision handling function for sphere robots. | |
| virtual void | doInternalStuff (const GlobalData &globalData) |
| this function is called in each timestep. | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. | |
| virtual void | setMotors (const motor *motors, int motornumber) |
| Reads the actual motor commands from an array, an sets all motors of the snake to this values. | |
| virtual int | getMotorNumber () |
| Returns the number of motors used by the snake. | |
| virtual int | getSensorNumber () |
| Returns the number of sensors used by the robot. | |
Static Public Member Functions | |
| static Sphererobot3MassesConf | getDefaultConf () |
Public Attributes | |
| Primitive * | object [Last] |
Protected Member Functions | |
| virtual Primitive * | getMainPrimitive () const |
| the main object of the robot, which is used for position and speed tracking | |
| virtual void | create (const osg::Matrix &pose) |
| creates vehicle at desired position | |
| virtual void | destroy () |
| destroys vehicle and space | |
Protected Attributes | |
| SliderServo * | servo [servono] |
| SliderJoint * | joint [servono] |
| OSGPrimitive * | axis [servono] |
| double | transparency |
| bool | created |
| Sphererobot3MassesConf | conf |
| RaySensorBank | irSensorBank |
Static Protected Attributes | |
| static const int | servono = 3 |
|
|
Definition at line 90 of file sphererobot3masses.h. |
|
||||||||||||||||||||||||
|
constructor
Definition at line 67 of file sphererobot3masses.cpp. |
|
|
Definition at line 84 of file sphererobot3masses.cpp. |
|
||||||||||||||||
|
This is the collision handling function for sphere robots. This overwrides the function collisionCallback of the class robot.
Implements OdeRobot. Definition at line 178 of file sphererobot3masses.cpp. |
|
|
creates vehicle at desired position
Definition at line 232 of file sphererobot3masses.cpp. |
|
|
destroys vehicle and space
Definition at line 315 of file sphererobot3masses.cpp. |
|
|
this function is called in each timestep. It should perform robot-internal checks, like space-internal collision detection, sensor resets/update etc.
Implements OdeRobot. Definition at line 166 of file sphererobot3masses.cpp. |
|
|
Definition at line 116 of file sphererobot3masses.h. |
|
|
the main object of the robot, which is used for position and speed tracking
Implements OdeRobot. Definition at line 187 of file sphererobot3masses.h. |
|
|
Returns the number of motors used by the snake.
Implements AbstractRobot. Definition at line 215 of file sphererobot3masses.cpp. |
|
|
Returns the number of sensors used by the robot.
Implements AbstractRobot. Definition at line 223 of file sphererobot3masses.cpp. |
|
||||||||||||
|
Writes the sensor values to an array in the memory.
Implements AbstractRobot. Definition at line 109 of file sphererobot3masses.cpp. |
|
|
sets the pose of the vehicle
Implements OdeRobot. Definition at line 159 of file sphererobot3masses.cpp. |
|
||||||||||||
|
Reads the actual motor commands from an array, an sets all motors of the snake to this values. It is an linear allocation.
Implements AbstractRobot. Definition at line 151 of file sphererobot3masses.cpp. |
|
|
update all primitives and joints
Implements OdeRobot. Definition at line 89 of file sphererobot3masses.cpp. |
|
|
Definition at line 97 of file sphererobot3masses.h. |
|
|
Definition at line 101 of file sphererobot3masses.h. |
|
|
Definition at line 99 of file sphererobot3masses.h. |
|
|
Definition at line 102 of file sphererobot3masses.h. |
|
|
Definition at line 96 of file sphererobot3masses.h. |
|
|
Definition at line 105 of file sphererobot3masses.h. |
|
|
Definition at line 95 of file sphererobot3masses.h. |
|
|
Definition at line 93 of file sphererobot3masses.h. |
|
|
Definition at line 98 of file sphererobot3masses.h. |
 1.4.5
1.4.5