#include <joint.h>
Inheritance diagram for Joint:
Definition at line 76 of file joint.h.
Public Member Functions | |
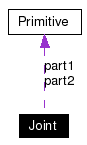
| Joint (Primitive *part1, Primitive *part2, const osg::Vec3 &anchor) | |
| virtual | ~Joint () |
| virtual void | init (const OdeHandle &odeHandle, const OsgHandle &osgHandle, bool withVisual=true, double visualSize=0.2)=0 |
| initialises (and creates) the joint. | |
| virtual void | update ()=0 |
| should syncronise the Ode stuff and the OSG notes (if any) | |
| virtual void | setParam (int parameter, double value)=0 |
| sets the ODE joint parameter (see ODE manual) | |
| virtual double | getParam (int parameter)=0 |
| return the ODE joint parameter (see ODE manual) | |
| dJointID | getJoint () const |
| const Primitive * | getPart1 () const |
| const Primitive * | getPart2 () const |
| const osg::Vec3 | getAnchor () const |
Static Public Member Functions | |
| static osg::Matrix | anchorAxisPose (const osg::Vec3 &anchor, const Axis &axis) |
Protected Attributes | |
| dJointID | joint |
| Primitive * | part1 |
| Primitive * | part2 |
| osg::Vec3 | anchor |
|
||||||||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
return the ODE joint parameter (see ODE manual)
Implemented in FixedJoint, HingeJoint, Hinge2Joint, UniversalJoint, BallJoint, and SliderJoint. |
|
|
|
|
|
|
|
||||||||||||||||||||
|
initialises (and creates) the joint. If visual is true then the joints is also drawn. visualSize is the size of the visual representation. (To be overloaded) Implemented in FixedJoint, HingeJoint, Hinge2Joint, UniversalJoint, BallJoint, and SliderJoint. |
|
||||||||||||
|
sets the ODE joint parameter (see ODE manual)
Implemented in FixedJoint, HingeJoint, Hinge2Joint, UniversalJoint, BallJoint, and SliderJoint. |
|
|
should syncronise the Ode stuff and the OSG notes (if any)
Implemented in FixedJoint, HingeJoint, Hinge2Joint, UniversalJoint, BallJoint, and SliderJoint. |
|
|
|
|
|
|
|
|
|
|
|
|
 1.4.5
1.4.5