|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
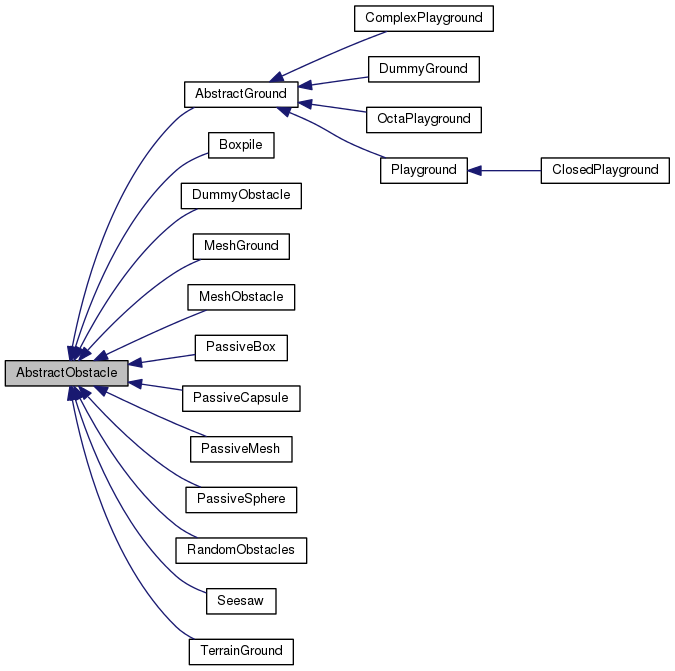
Abstract class (interface) for obstacles. More...
#include <abstractobstacle.h>
Public Member Functions | |
| AbstractObstacle (const OdeHandle &odeHandle, const OsgHandle &osgHandle) | |
| Constructor. More... | |
| virtual | ~AbstractObstacle () |
| virtual void | update () |
| updates the position if the scenegraph nodes the default implementation calls update on all primitive on "obst" More... | |
| virtual void | setPos (const osg::Vec3 &pos) |
| sets position of the obstacle and creates/recreates obstacle if necessary More... | |
| virtual void | setPosition (const osg::Vec3 &pos) |
| sets position of the obstacle and creates/recreates obstacle if necessary More... | |
| virtual osg::Vec3 | getPos () |
| gives actual position of the obstacle More... | |
| virtual osg::Matrix | getPose () |
| gives actual pose of the obstacle More... | |
| virtual void | setPose (const osg::Matrix &pose)=0 |
| sets position of the obstacle and creates/recreates obstacle if necessary More... | |
| virtual void | setColor (const Color &color) |
| sets the obstacle color More... | |
| virtual void | setColor (const std::string &color) |
| virtual void | setTexture (const std::string &texturefilename) |
| assigns a texture to the all primitives of this obstactle with repeat -1,-1 More... | |
| virtual void | setTexture (const TextureDescr &texture) |
| assigns a texture to the all primitives of this obstactle More... | |
| virtual void | setTexture (int surface, const TextureDescr &texture) |
| assigns a texture to the x-th surface of each primitive, More... | |
| virtual void | setTexture (int primitive, int surface, const TextureDescr &texture) |
| assigns a texture to the x-th surface of the k-th primitive, (The texture setting of the last primitve is repeated for the remaining ones) More... | |
| virtual TextureDescr | getTexture (int primitive, int surface) const |
| returns the texture of the given surface on the given primitive More... | |
| virtual std::vector< TextureDescr > | getTextures (int primitive) const |
| returns the textures of the given primitive More... | |
| virtual Primitive * | getMainPrimitive () const =0 |
| return the "main" primitive of the obtactle. The meaning of "main" is arbitrary More... | |
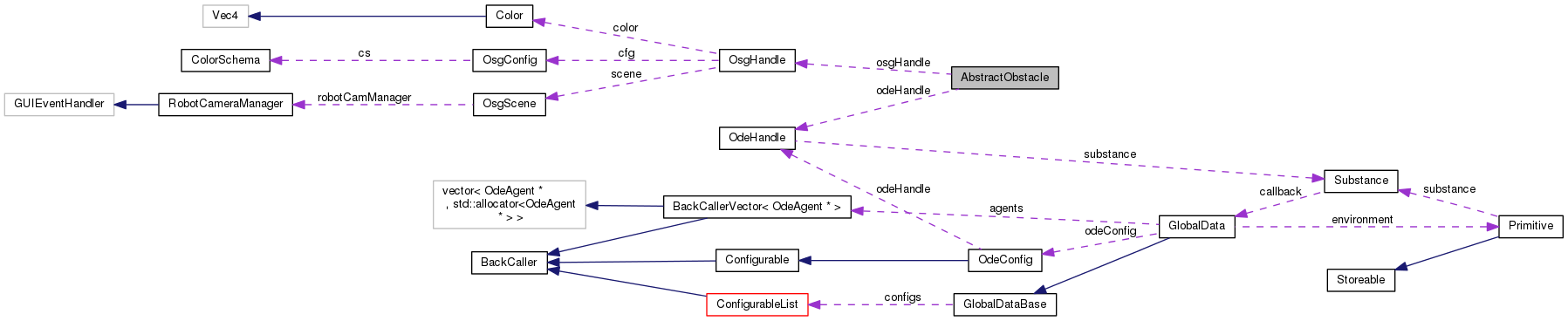
| virtual void | setSubstance (const Substance &substance) |
| sets the substance of the obtactle. More... | |
| virtual const Substance & | getSubstance () |
| returns the substance of this obstacle More... | |
| virtual Position | getPosition () const |
| returns position of the object More... | |
| virtual Position | getSpeed () const |
| returns linear speed vector of the object More... | |
| virtual Position | getAngularSpeed () const |
| returns angular velocity vector of the object More... | |
| virtual matrix::Matrix | getOrientation () const |
| returns the orientation of the object More... | |
Protected Member Functions | |
| virtual void | destroy () |
| is called to destroy the object. The default implementation is to delete all primitives in "obst". More... | |
| virtual void | create ()=0 |
| overload this function to create the obstactle. All primitives should go into the list "obst" More... | |
Protected Attributes | |
| std::vector< Primitive * > | obst |
| primitives which belong to this obstacle More... | |
| std::vector< std::vector < TextureDescr > > | textures |
| for each primitive the texture settings per surface More... | |
| osg::Matrix | pose |
| bool | obstacle_exists |
| OdeHandle | odeHandle |
| OsgHandle | osgHandle |
Abstract class (interface) for obstacles.
| AbstractObstacle | ( | const OdeHandle & | odeHandle, |
| const OsgHandle & | osgHandle | ||
| ) |
Constructor.
| odeHandle | containing ODE stuff like world, space and jointgroup |
| osgHandle | containing OSG stuff like scene, color... be used for creation of obstacles |
|
virtual |
|
protectedpure virtual |
overload this function to create the obstactle. All primitives should go into the list "obst"
Implemented in ComplexPlayground, PassiveMesh, RandomObstacles, Boxpile, PassiveCapsule, MeshObstacle, PassiveBox, PassiveSphere, Seesaw, TerrainGround, MeshGround, Playground, OctaPlayground, DummyObstacle, ClosedPlayground, and DummyGround.
|
protectedvirtual |
is called to destroy the object. The default implementation is to delete all primitives in "obst".
Reimplemented in MeshObstacle, PassiveMesh, TerrainGround, MeshGround, and ClosedPlayground.
|
virtual |
returns angular velocity vector of the object
|
pure virtual |
return the "main" primitive of the obtactle. The meaning of "main" is arbitrary
Implemented in PassiveMesh, RandomObstacles, PassiveCapsule, Boxpile, PassiveBox, PassiveSphere, TerrainGround, Seesaw, AbstractGround, and DummyObstacle.
|
virtual |
returns the orientation of the object
|
virtual |
gives actual position of the obstacle
|
virtual |
gives actual pose of the obstacle
|
virtual |
returns position of the object
|
virtual |
returns linear speed vector of the object
|
virtual |
returns the substance of this obstacle
|
virtual |
returns the texture of the given surface on the given primitive
|
virtual |
returns the textures of the given primitive
|
virtual |
sets the obstacle color
| color | values in RGBA |
|
virtual |
|
virtual |
sets position of the obstacle and creates/recreates obstacle if necessary
|
pure virtual |
sets position of the obstacle and creates/recreates obstacle if necessary
Implemented in RandomObstacles, PassiveMesh, PassiveCapsule, Boxpile, MeshObstacle, TerrainGround, MeshGround, PassiveBox, PassiveSphere, Seesaw, AbstractGround, and DummyObstacle.
|
virtual |
sets position of the obstacle and creates/recreates obstacle if necessary
|
virtual |
sets the substance of the obtactle.
It is applied to all objects in obj
| substance | description of the substance |
|
virtual |
assigns a texture to the all primitives of this obstactle with repeat -1,-1
Reimplemented in PassiveCapsule, and PassiveSphere.
|
virtual |
assigns a texture to the all primitives of this obstactle
|
virtual |
assigns a texture to the x-th surface of each primitive,
|
virtual |
assigns a texture to the x-th surface of the k-th primitive, (The texture setting of the last primitve is repeated for the remaining ones)
|
virtual |
updates the position if the scenegraph nodes the default implementation calls update on all primitive on "obst"
Reimplemented in PassiveMesh, PassiveCapsule, TerrainGround, MeshObstacle, and MeshGround.
|
protected |
primitives which belong to this obstacle
|
protected |
|
protected |
|
protected |
|
protected |
|
protected |
for each primitive the texture settings per surface
 1.8.6
1.8.6 
