|
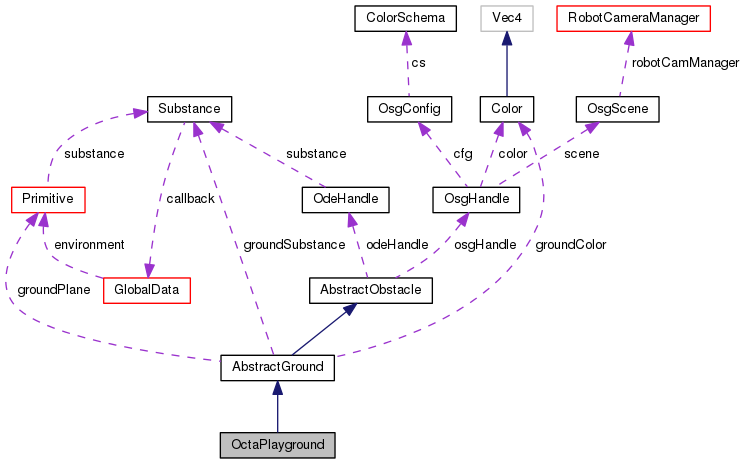
| | OctaPlayground (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Pos &geometry=Pos(7, 0.2, 0.5), int numberCorners=8, bool createGround=true) |
| |
| | AbstractGround (const OdeHandle &odeHandle, const OsgHandle &osgHandle, bool createGround, double groundLength, double groundWidth, double wallThickness) |
| |
| virtual | ~AbstractGround () |
| |
| virtual void | setPose (const osg::Matrix &pose) |
| | sets position of the obstacle and creates/recreates obstacle if necessary More...
|
| |
| virtual void | createGround (bool create) |
| |
| virtual Primitive * | getMainPrimitive () const |
| | return the "main" primitive of the obtactle. The meaning of "main" is arbitrary More...
|
| |
| virtual void | changeGeometry (double length, double width, double height, double factorxy) |
| |
| virtual void | printContours (FILE *f) |
| | prints the contour of the boxes into the file More...
|
| |
| virtual void | setGroundTexture (const std::string &filename) |
| | assigns the texture to the object More...
|
| |
| virtual void | setGroundColor (const Color &color) |
| | sets the ground color should be called before setPosition() More...
|
| |
| virtual void | setGroundSubstance (const Substance &substance) |
| | sets the substance of the ground. More...
|
| |
| virtual std::list< Position > | getCornerPointsXY () |
| | returns the corner points of the groundplane More...
|
| |
| virtual double | getGroundLength () |
| | size in x dimension More...
|
| |
| virtual double | getGroundWidth () |
| | size in y dimension More...
|
| |
| virtual double | getGroundThickness () |
| |
| virtual void | setGroundThickness (double thickness) |
| |
| | AbstractObstacle (const OdeHandle &odeHandle, const OsgHandle &osgHandle) |
| | Constructor. More...
|
| |
| virtual | ~AbstractObstacle () |
| |
| virtual void | update () |
| | updates the position if the scenegraph nodes the default implementation calls update on all primitive on "obst" More...
|
| |
| virtual void | setPos (const osg::Vec3 &pos) |
| | sets position of the obstacle and creates/recreates obstacle if necessary More...
|
| |
| virtual void | setPosition (const osg::Vec3 &pos) |
| | sets position of the obstacle and creates/recreates obstacle if necessary More...
|
| |
| virtual osg::Vec3 | getPos () |
| | gives actual position of the obstacle More...
|
| |
| virtual osg::Matrix | getPose () |
| | gives actual pose of the obstacle More...
|
| |
| virtual void | setColor (const Color &color) |
| | sets the obstacle color More...
|
| |
| virtual void | setColor (const std::string &color) |
| |
| virtual void | setTexture (const std::string &texturefilename) |
| | assigns a texture to the all primitives of this obstactle with repeat -1,-1 More...
|
| |
| virtual void | setTexture (const TextureDescr &texture) |
| | assigns a texture to the all primitives of this obstactle More...
|
| |
| virtual void | setTexture (int surface, const TextureDescr &texture) |
| | assigns a texture to the x-th surface of each primitive, More...
|
| |
| virtual void | setTexture (int primitive, int surface, const TextureDescr &texture) |
| | assigns a texture to the x-th surface of the k-th primitive, (The texture setting of the last primitve is repeated for the remaining ones) More...
|
| |
| virtual TextureDescr | getTexture (int primitive, int surface) const |
| | returns the texture of the given surface on the given primitive More...
|
| |
| virtual std::vector< TextureDescr > | getTextures (int primitive) const |
| | returns the textures of the given primitive More...
|
| |
| virtual void | setSubstance (const Substance &substance) |
| | sets the substance of the obtactle. More...
|
| |
| virtual const Substance & | getSubstance () |
| | returns the substance of this obstacle More...
|
| |
| virtual Position | getPosition () const |
| | returns position of the object More...
|
| |
| virtual Position | getSpeed () const |
| | returns linear speed vector of the object More...
|
| |
| virtual Position | getAngularSpeed () const |
| | returns angular velocity vector of the object More...
|
| |
| virtual matrix::Matrix | getOrientation () const |
| | returns the orientation of the object More...
|
| |
 Public Member Functions inherited from AbstractGround
Public Member Functions inherited from AbstractGround 1.8.6
1.8.6 
