#include <abstractobstacle.h>
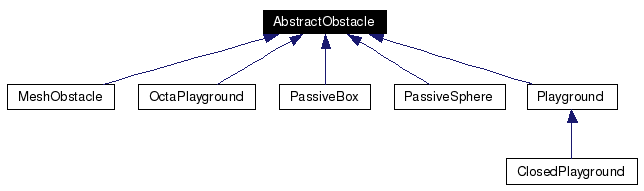
Inheritance diagram for AbstractObstacle:
Definition at line 69 of file abstractobstacle.h.
Public Member Functions | |
| AbstractObstacle (const OdeHandle &odeHandle, const OsgHandle &osgHandle) | |
| Constructor. | |
| virtual | ~AbstractObstacle () |
| virtual void | update ()=0 |
| updates the position if the scenegraph nodes | |
| void | setPosition (const osg::Vec3 &pos) |
| sets position of the obstacle and creates/recreates obstacle if necessary | |
| osg::Vec3 | getPosition () |
| gives actual position of the obstacle | |
| virtual void | setPose (const osg::Matrix &pose)=0 |
| sets position of the obstacle and creates/recreates obstacle if necessary | |
| virtual osg::Matrix | getPose ()=0 |
| gives actual pose of the obstacle | |
| virtual void | setColor (const Color &color) |
| sets the obstacle color | |
Protected Attributes | |
| osg::Matrix | pose |
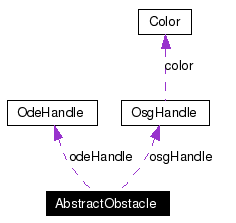
| OdeHandle | odeHandle |
| OsgHandle | osgHandle |
|
||||||||||||
|
Constructor.
Definition at line 78 of file abstractobstacle.h. |
|
|
Definition at line 82 of file abstractobstacle.h. |
|
|
gives actual pose of the obstacle
Implemented in MeshObstacle, OctaPlayground, PassiveBox, PassiveSphere, and Playground. |
|
|
gives actual position of the obstacle
Reimplemented in PassiveBox. Definition at line 100 of file abstractobstacle.h. |
|
|
sets the obstacle color
Definition at line 118 of file abstractobstacle.h. |
|
|
sets position of the obstacle and creates/recreates obstacle if necessary
Implemented in MeshObstacle, OctaPlayground, PassiveBox, PassiveSphere, and Playground. |
|
|
sets position of the obstacle and creates/recreates obstacle if necessary
Reimplemented in PassiveBox.
Definition at line 92 of file abstractobstacle.h. |
|
|
updates the position if the scenegraph nodes
Implemented in MeshObstacle, OctaPlayground, PassiveBox, PassiveSphere, and Playground. |
|
|
Definition at line 125 of file abstractobstacle.h. |
|
|
Definition at line 126 of file abstractobstacle.h. |
|
|
Definition at line 120 of file abstractobstacle.h. |
 1.4.5
1.4.5