|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
Abstract class for sensors that can be plugged into a robot. More...
#include <sensor.h>
Public Types | |
| enum | Dimensions { X = 1, Y = 2, Z = 4, XY = X | Y, XZ = X | Z, YZ = Y | Z, XYZ = X | Y | Z } |
| defines which dimensions should be sensed. The meaning is sensor specific. More... | |
 Public Types inherited from SensorMotorInfoAble Public Types inherited from SensorMotorInfoAble | |
| typedef std::function < std::string(int)> | NamingFunction |
| function that returns the name given the index More... | |
Public Member Functions | |
| Sensor () | |
| virtual | ~Sensor () |
| virtual void | init (Primitive *own, Joint *joint=0)=0 |
| initialises sensor with a body of robot and optionally with a joint. More... | |
| virtual bool | sense (const GlobalData &globaldata)=0 |
| performs sense action More... | |
| virtual int | getSensorNumber () const =0 |
| returns the number of sensors values produced by this sensor More... | |
| virtual std::list< sensor > | getList () const =0 |
| returns a list of sensor values (usually in the range [-1,1] ) This function should be overloaded. More... | |
| virtual std::list < SensorMotorInfo > | getSensorInfos () const |
| returns a list of sensor infos ( More... | |
| virtual void | update () |
| to update any visual appearance More... | |
| virtual int | get (sensor *sensors, int length) const |
| writes the sensor values (usually in the range [-1,1] ) into the given sensor array and returns the number of sensors written. More... | |
| std::list< sensor > | getListOfArray () const |
| helper function for performance implementation of list<> get() based on array-get More... | |
| Public Member Functions inherited from SensorMotorInfoAble | |
| SensorMotorInfoAble () | |
| void | setBaseName (const std::string &basename) |
| void | setBaseInfo (const SensorMotorInfo &baseinfo) |
| SensorMotorInfo | getBaseInfo () |
| void | setNamingFunc (const NamingFunction &func) |
| NamingFunction | getNamingFunc () const |
| void | setNames (const std::vector< std::string > &names) |
| set names explicitly (basename is anyway suffixed) More... | |
| std::string | getName (int index) const |
| returns the name of a single item. Typically called from within Sensor and Motor class. More... | |
| std::list< SensorMotorInfo > | getInfos (int number) const |
| get all infos. More... | |
Static Public Member Functions | |
| static std::list< sensor > | selectrows (const matrix::Matrix &m, short dimensions) |
| selects the rows specified by dimensions (X->0, Y->1, Z->2) More... | |
| static int | selectrows (sensor *sensors, int length, const matrix::Matrix &m, short dimensions) |
| selects the rows specified by dimensions (X->0, Y->1, Z->2) More... | |
| static Dimensions | parseSensorDimension (char *str) |
| static std::string | dimensions2String (short dimensions) |
| Static Public Member Functions inherited from SensorMotorInfoAble | |
| static std::string | defaultNameing (int index) |
| the default implementation is for index==0: basename, otherwise basename + (index+1) More... | |
Additional Inherited Members | |
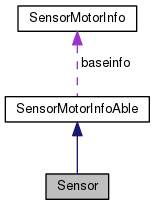
| Protected Attributes inherited from SensorMotorInfoAble | |
| NamingFunction | func |
| SensorMotorInfo | baseinfo |
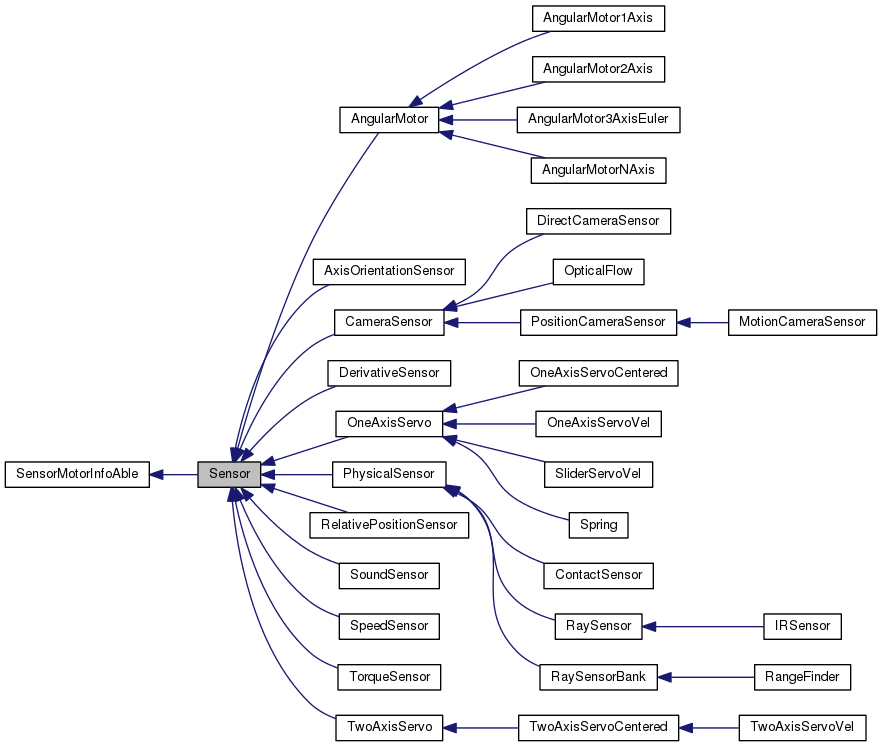
Abstract class for sensors that can be plugged into a robot.
| enum Dimensions |
|
inline |
|
inlinevirtual |
|
inlinestatic |
|
inlinevirtual |
writes the sensor values (usually in the range [-1,1] ) into the given sensor array and returns the number of sensors written.
A default implementation based on get() is provided. Only if performance matters overwrite this function.
| sensors | call by refernce array which received the values |
| length | capacity of sensors array |
Reimplemented in PositionCameraSensor, OpticalFlow, TwoAxisServo, DirectCameraSensor, OneAxisServo, RaySensor, ContactSensor, CameraSensor, SoundSensor, AxisOrientationSensor, SpeedSensor, AngularMotor, TorqueSensor, IRSensor, and RaySensorBank.
|
pure virtual |
returns a list of sensor values (usually in the range [-1,1] ) This function should be overloaded.
If performance matters, implement get(double*, int) and use getListOfArray to implement this.
Implemented in TwoAxisServo, CameraSensor, RaySensor, ContactSensor, OneAxisServo, SoundSensor, AxisOrientationSensor, SpeedSensor, IRSensor, AngularMotor, RaySensorBank, TorqueSensor, RelativePositionSensor, and DerivativeSensor.
|
inline |
helper function for performance implementation of list<> get() based on array-get
|
inlinevirtual |
returns a list of sensor infos (
|
pure virtual |
returns the number of sensors values produced by this sensor
Implemented in PositionCameraSensor, OpticalFlow, TwoAxisServo, RaySensor, DirectCameraSensor, OneAxisServo, CameraSensor, ContactSensor, SoundSensor, AxisOrientationSensor, SpeedSensor, AngularMotor, TorqueSensor, RaySensorBank, RelativePositionSensor, and DerivativeSensor.
initialises sensor with a body of robot and optionally with a joint.
This is usually done by the robot itself (or using the Attachment())
Implemented in TwoAxisServoVel, AngularMotorNAxis, OneAxisServoVel, AngularMotor3AxisEuler, AngularMotor2Axis, AngularMotor1Axis, TwoAxisServo, RaySensor, ContactSensor, CameraSensor, OneAxisServo, SoundSensor, AxisOrientationSensor, SpeedSensor, TorqueSensor, AngularMotor, RaySensorBank, RelativePositionSensor, RangeFinder, and DerivativeSensor.
|
inlinestatic |
|
inlinestatic |
selects the rows specified by dimensions (X->0, Y->1, Z->2)
|
inlinestatic |
selects the rows specified by dimensions (X->0, Y->1, Z->2)
|
pure virtual |
performs sense action
Implemented in MotionCameraSensor, PositionCameraSensor, OpticalFlow, TwoAxisServo, RaySensor, ContactSensor, OneAxisServo, CameraSensor, DirectCameraSensor, SoundSensor, AxisOrientationSensor, SpeedSensor, TorqueSensor, IRSensor, RaySensorBank, AngularMotor, RelativePositionSensor, and DerivativeSensor.
|
inlinevirtual |
to update any visual appearance
Reimplemented in RaySensor, ContactSensor, CameraSensor, and RaySensorBank.
 1.8.6
1.8.6 
