|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
Abstact base class for attachable motors. More...
#include <motor.h>
Public Member Functions | |
| Motor () | |
| virtual | ~Motor () |
| virtual void | init (Primitive *own, Joint *joint=0)=0 |
| initialises motor with body of robot More... | |
| virtual int | getMotorNumber () const =0 |
| return the dimensionality of this motor More... | |
| virtual std::list < SensorMotorInfo > | getMotorInfos () const |
| returns a list of motor names ( More... | |
| virtual bool | act (GlobalData &globaldata)=0 |
| performs the actions, This is usually called in doInternalStuff() from the robot More... | |
| virtual int | set (const motor *values, int length)=0 |
| sends the action commands to the motor. More... | |
 Public Member Functions inherited from SensorMotorInfoAble Public Member Functions inherited from SensorMotorInfoAble | |
| SensorMotorInfoAble () | |
| void | setBaseName (const std::string &basename) |
| void | setBaseInfo (const SensorMotorInfo &baseinfo) |
| SensorMotorInfo | getBaseInfo () |
| void | setNamingFunc (const NamingFunction &func) |
| NamingFunction | getNamingFunc () const |
| void | setNames (const std::vector< std::string > &names) |
| set names explicitly (basename is anyway suffixed) More... | |
| std::string | getName (int index) const |
| returns the name of a single item. Typically called from within Sensor and Motor class. More... | |
| std::list< SensorMotorInfo > | getInfos (int number) const |
| get all infos. More... | |
Additional Inherited Members | |
| Public Types inherited from SensorMotorInfoAble | |
| typedef std::function < std::string(int)> | NamingFunction |
| function that returns the name given the index More... | |
| Static Public Member Functions inherited from SensorMotorInfoAble | |
| static std::string | defaultNameing (int index) |
| the default implementation is for index==0: basename, otherwise basename + (index+1) More... | |
| Protected Attributes inherited from SensorMotorInfoAble | |
| NamingFunction | func |
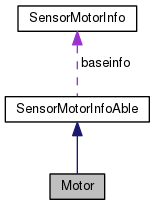
| SensorMotorInfo | baseinfo |
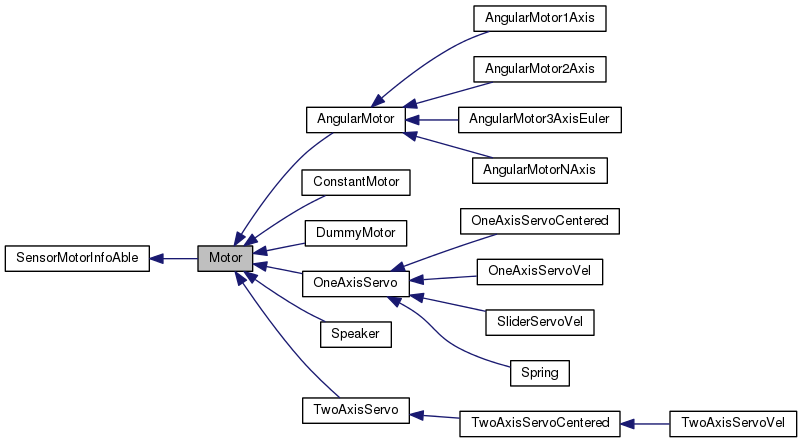
Abstact base class for attachable motors.
|
inline |
|
inlinevirtual |
|
pure virtual |
performs the actions, This is usually called in doInternalStuff() from the robot
Implemented in TwoAxisServo, OneAxisServo, AngularMotor, Speaker, ConstantMotor, and DummyMotor.
|
inlinevirtual |
returns a list of motor names (
|
pure virtual |
return the dimensionality of this motor
Implemented in TwoAxisServo, OneAxisServo, AngularMotor, ConstantMotor, Speaker, and DummyMotor.
initialises motor with body of robot
Implemented in TwoAxisServoVel, AngularMotorNAxis, OneAxisServoVel, AngularMotor3AxisEuler, AngularMotor2Axis, AngularMotor1Axis, TwoAxisServo, OneAxisServo, AngularMotor, ConstantMotor, Speaker, and DummyMotor.
|
pure virtual |
sends the action commands to the motor.
It returns the number of used values. (should be equal to getMotorNumber)
Implemented in TwoAxisServo, OneAxisServo, AngularMotor, Speaker, ConstantMotor, and DummyMotor.
 1.8.6
1.8.6 
