|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
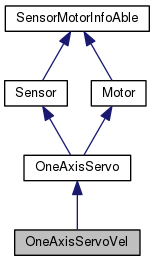
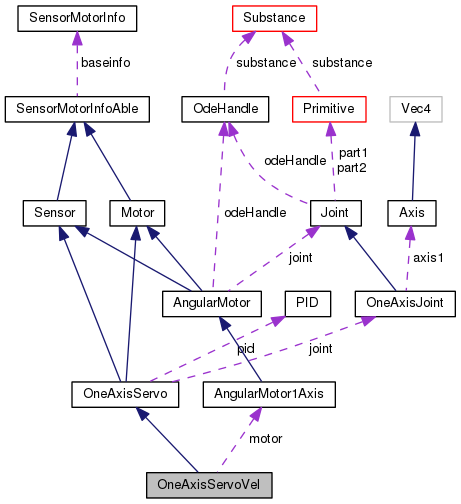
general servo motor to achieve position control. More...
#include <oneaxisservo.h>
Public Member Functions | |
| OneAxisServoVel (const OdeHandle &odeHandle, OneAxisJoint *joint, double _min, double _max, double power, double damp=0.05, double maxVel=20, double jointLimit=1.3) | |
| min and max values are understood as travel bounds. More... | |
| virtual | ~OneAxisServoVel () |
| virtual void | init (Primitive *own, Joint *joint=0) override |
| initialises motor with body of robot More... | |
| virtual void | setPower (double _power) override |
| adjusts the power of the servo More... | |
| virtual double | getPower () override |
| returns the power of the servo More... | |
| virtual double | getDamping () override |
| returns the damping of the servo More... | |
| virtual void | setDamping (double _damp) override |
| sets the damping of the servo More... | |
| virtual double & | offsetCanceling () override |
| offetCanceling does not exist for this type of servo More... | |
| virtual void | setMaxVel (double maxVel) override |
| adjusts maximal speed of servo More... | |
| virtual double | getMaxVel () override |
| adjusts maximal speed of servo More... | |
| virtual void | set (double pos) override |
| sets the set point of the servo. More... | |
| virtual double | get () const override |
| returns the position of the servo in ranges [-1, 1] (scaled by min, max, centered) More... | |
 Public Member Functions inherited from OneAxisServo Public Member Functions inherited from OneAxisServo | |
| OneAxisServo (OneAxisJoint *joint, double _min, double _max, double power, double damp=0.2, double integration=2, double maxVel=10.0, double jointLimit=1.3, bool minmaxCheck=true) | |
| min and max values are understood as travel bounds. More... | |
| virtual | ~OneAxisServo () |
| virtual bool | sense (const GlobalData &globaldata) override |
| performs sense action More... | |
| virtual int | getSensorNumber () const override |
| returns the number of sensors values produced by this sensor More... | |
| virtual std::list< sensor > | getList () const |
| returns a list of sensor values (usually in the range [-1,1] ) This function should be overloaded. More... | |
| virtual int | get (sensor *sensors, int length) const |
| writes the sensor values (usually in the range [-1,1] ) into the given sensor array and returns the number of sensors written. More... | |
| virtual int | getMotorNumber () const override |
| return the dimensionality of this motor More... | |
| virtual bool | act (GlobalData &globaldata) override |
| performs the actions, This is usually called in doInternalStuff() from the robot More... | |
| virtual int | set (const motor *values, int length) override |
| sends the action commands to the motor. More... | |
| virtual void | setMinMax (double _min, double _max) |
| Public Member Functions inherited from Sensor | |
| Sensor () | |
| virtual | ~Sensor () |
| virtual std::list < SensorMotorInfo > | getSensorInfos () const |
| returns a list of sensor infos ( More... | |
| virtual void | update () |
| to update any visual appearance More... | |
| std::list< sensor > | getListOfArray () const |
| helper function for performance implementation of list<> get() based on array-get More... | |
| Public Member Functions inherited from SensorMotorInfoAble | |
| SensorMotorInfoAble () | |
| void | setBaseName (const std::string &basename) |
| void | setBaseInfo (const SensorMotorInfo &baseinfo) |
| SensorMotorInfo | getBaseInfo () |
| void | setNamingFunc (const NamingFunction &func) |
| NamingFunction | getNamingFunc () const |
| void | setNames (const std::vector< std::string > &names) |
| set names explicitly (basename is anyway suffixed) More... | |
| std::string | getName (int index) const |
| returns the name of a single item. Typically called from within Sensor and Motor class. More... | |
| std::list< SensorMotorInfo > | getInfos (int number) const |
| get all infos. More... | |
| Public Member Functions inherited from Motor | |
| Motor () | |
| virtual | ~Motor () |
| virtual std::list < SensorMotorInfo > | getMotorInfos () const |
| returns a list of motor names ( More... | |
Protected Attributes | |
| AngularMotor1Axis | motor |
| double | dummy |
| double | power |
| double | damp |
| Protected Attributes inherited from OneAxisServo | |
| OneAxisJoint * | joint |
| double | min |
| double | max |
| PID | pid |
| double | maxVel |
| double | jointLimit |
| joint limit with respect to servo limit More... | |
| Protected Attributes inherited from SensorMotorInfoAble | |
| NamingFunction | func |
| SensorMotorInfo | baseinfo |
Additional Inherited Members | |
| Public Types inherited from Sensor | |
| enum | Dimensions { X = 1, Y = 2, Z = 4, XY = X | Y, XZ = X | Z, YZ = Y | Z, XYZ = X | Y | Z } |
| defines which dimensions should be sensed. The meaning is sensor specific. More... | |
| Public Types inherited from SensorMotorInfoAble | |
| typedef std::function < std::string(int)> | NamingFunction |
| function that returns the name given the index More... | |
| Static Public Member Functions inherited from Sensor | |
| static std::list< sensor > | selectrows (const matrix::Matrix &m, short dimensions) |
| selects the rows specified by dimensions (X->0, Y->1, Z->2) More... | |
| static int | selectrows (sensor *sensors, int length, const matrix::Matrix &m, short dimensions) |
| selects the rows specified by dimensions (X->0, Y->1, Z->2) More... | |
| static Dimensions | parseSensorDimension (char *str) |
| static std::string | dimensions2String (short dimensions) |
| Static Public Member Functions inherited from SensorMotorInfoAble | |
| static std::string | defaultNameing (int index) |
| the default implementation is for index==0: basename, otherwise basename + (index+1) More... | |
general servo motor to achieve position control.
It internally controls the velocity of the motor (much more stable) with centered zero position. The amount of body feeling can be adjusted by the damping parameter which is understood as a stiffness parameter
| OneAxisServoVel | ( | const OdeHandle & | odeHandle, |
| OneAxisJoint * | joint, | ||
| double | _min, | ||
| double | _max, | ||
| double | power, | ||
| double | damp = 0.05, |
||
| double | maxVel = 20, |
||
| double | jointLimit = 1.3 |
||
| ) |
min and max values are understood as travel bounds.
The zero position is (max-min)/2
| power | is the maximal torque the servo can generate |
| maxVel | is understood as a speed parameter of the servo. |
| damp | adjusts the power of the servo in dependence of the distance to the set point (current control error). This regulates the stiffness and the body feeling 0: the servo has no power at the set point (maximal body feeling); 1: is servo has full power at the set point: maximal stiffness, perfectly damped. |
|
virtual |
|
inlineoverridevirtual |
returns the position of the servo in ranges [-1, 1] (scaled by min, max, centered)
Reimplemented from OneAxisServo.
|
inlineoverridevirtual |
returns the damping of the servo
Reimplemented from OneAxisServo.
|
inlineoverridevirtual |
adjusts maximal speed of servo
Reimplemented from OneAxisServo.
|
inlineoverridevirtual |
returns the power of the servo
Reimplemented from OneAxisServo.
initialises motor with body of robot
Reimplemented from OneAxisServo.
|
inlineoverridevirtual |
offetCanceling does not exist for this type of servo
Reimplemented from OneAxisServo.
|
overridevirtual |
sets the set point of the servo.
Position must be between -1 and 1. It is scaled to fit into min, max, however 0 is just in the center of min and max
Reimplemented from OneAxisServo.
|
inlineoverridevirtual |
sets the damping of the servo
Reimplemented from OneAxisServo.
|
inlineoverridevirtual |
adjusts maximal speed of servo
Reimplemented from OneAxisServo.
|
overridevirtual |
adjusts the power of the servo
Reimplemented from OneAxisServo.
|
protected |
|
protected |
|
protected |
|
protected |
 1.8.6
1.8.6 
