|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
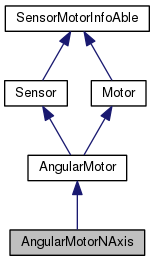
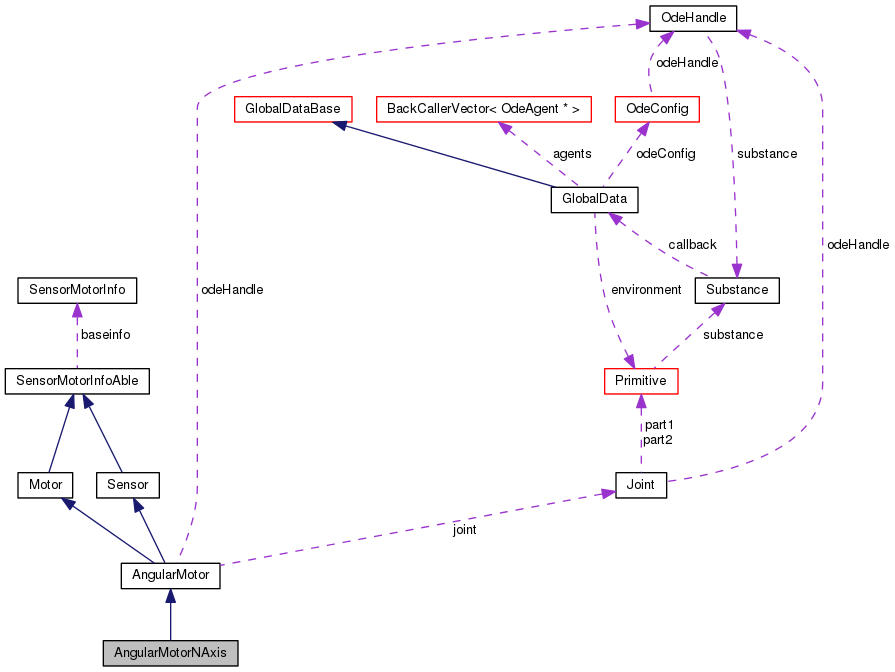
Angular motor for arbitrary Joints with custom axis (up to 3) More...
#include <angularmotor.h>
Public Member Functions | |
| AngularMotorNAxis (const OdeHandle &odeHandle, Joint *joint, std::list< std::pair< double, Axis > > axis) | |
| Constuct a motor attached to any Joint (not Sliders!). More... | |
| virtual | ~AngularMotorNAxis () |
| virtual void | init (Primitive *own, Joint *joint=0) override |
| initialises motor with body of robot More... | |
| virtual int | getNumberOfAxes () const override |
| returns the number of Axis of this Motor More... | |
| virtual void | set (int axisNumber, double velocity) |
| sets the desired speed of the motor at the given axis. More... | |
| virtual double | get (int axisNumber) const override |
| returns the speed (PositionRate) at the given axis, or zero if the axis is out of range The problem is, that we don't have actual information available. More... | |
| virtual void | setPower (double power) |
| sets the maximal force the motor has More... | |
 Public Member Functions inherited from AngularMotor Public Member Functions inherited from AngularMotor | |
| AngularMotor (const OdeHandle &odeHandle, Joint *joint) | |
| creates a AMotor attached to the same bodies as the given joint. More... | |
| virtual | ~AngularMotor () |
| virtual bool | sense (const GlobalData &globaldata) override |
| performs sense action More... | |
| virtual int | getSensorNumber () const override |
| returns the number of sensors values produced by this sensor More... | |
| virtual std::list< sensor > | getList () const override |
| returns a list of sensor values (usually in the range [-1,1] ) This function should be overloaded. More... | |
| virtual int | get (sensor *sensors, int length) const override |
| returns the speed (PositionRate) of all axis More... | |
| virtual int | getMotorNumber () const override |
| return the dimensionality of this motor More... | |
| virtual bool | act (GlobalData &globaldata) override |
| performs the actions, This is usually called in doInternalStuff() from the robot More... | |
| virtual int | set (const motor *values, int length) override |
| sends the action commands to the motor. More... | |
| virtual double | getPower () |
| return the maximal force More... | |
| virtual Joint * | getJoint () |
| returns the joint to which this motor is attached More... | |
| virtual void | setParam (int parameter, double value) |
| sets the parameters of the motor More... | |
| virtual double | getParam (int parameter) |
| return the ODE joint parameter (see ODE manual) More... | |
| virtual void | setVelovityFactor (double factor) |
| sets factor for velocity More... | |
| virtual double | getVelovityFactor (double factor) |
| retuns factor for velocity More... | |
| Public Member Functions inherited from Sensor | |
| Sensor () | |
| virtual | ~Sensor () |
| virtual std::list < SensorMotorInfo > | getSensorInfos () const |
| returns a list of sensor infos ( More... | |
| virtual void | update () |
| to update any visual appearance More... | |
| std::list< sensor > | getListOfArray () const |
| helper function for performance implementation of list<> get() based on array-get More... | |
| Public Member Functions inherited from SensorMotorInfoAble | |
| SensorMotorInfoAble () | |
| void | setBaseName (const std::string &basename) |
| void | setBaseInfo (const SensorMotorInfo &baseinfo) |
| SensorMotorInfo | getBaseInfo () |
| void | setNamingFunc (const NamingFunction &func) |
| NamingFunction | getNamingFunc () const |
| void | setNames (const std::vector< std::string > &names) |
| set names explicitly (basename is anyway suffixed) More... | |
| std::string | getName (int index) const |
| returns the name of a single item. Typically called from within Sensor and Motor class. More... | |
| std::list< SensorMotorInfo > | getInfos (int number) const |
| get all infos. More... | |
| Public Member Functions inherited from Motor | |
| Motor () | |
| virtual | ~Motor () |
| virtual std::list < SensorMotorInfo > | getMotorInfos () const |
| returns a list of motor names ( More... | |
Protected Attributes | |
| std::list< std::pair< double, Axis > > | axis |
| Protected Attributes inherited from AngularMotor | |
| dJointID | motor |
| OdeHandle | odeHandle |
| double | velocityFactor |
| Joint * | joint |
| bool | initialized |
| Protected Attributes inherited from SensorMotorInfoAble | |
| NamingFunction | func |
| SensorMotorInfo | baseinfo |
Additional Inherited Members | |
| Public Types inherited from Sensor | |
| enum | Dimensions { X = 1, Y = 2, Z = 4, XY = X | Y, XZ = X | Z, YZ = Y | Z, XYZ = X | Y | Z } |
| defines which dimensions should be sensed. The meaning is sensor specific. More... | |
| Public Types inherited from SensorMotorInfoAble | |
| typedef std::function < std::string(int)> | NamingFunction |
| function that returns the name given the index More... | |
| Static Public Member Functions inherited from Sensor | |
| static std::list< sensor > | selectrows (const matrix::Matrix &m, short dimensions) |
| selects the rows specified by dimensions (X->0, Y->1, Z->2) More... | |
| static int | selectrows (sensor *sensors, int length, const matrix::Matrix &m, short dimensions) |
| selects the rows specified by dimensions (X->0, Y->1, Z->2) More... | |
| static Dimensions | parseSensorDimension (char *str) |
| static std::string | dimensions2String (short dimensions) |
| Static Public Member Functions inherited from SensorMotorInfoAble | |
| static std::string | defaultNameing (int index) |
| the default implementation is for index==0: basename, otherwise basename + (index+1) More... | |
Angular motor for arbitrary Joints with custom axis (up to 3)
| AngularMotorNAxis | ( | const OdeHandle & | odeHandle, |
| Joint * | joint, | ||
| std::list< std::pair< double, Axis > > | axis | ||
| ) |
Constuct a motor attached to any Joint (not Sliders!).
The axis have to be provided by the user.
| axis | list of axis vector and power If empty then it motor is disabled. Power is the maximum force or torque that the motor will use to achieve the desired velocity. This must always be greater than or equal to zero. Setting this to zero (the default value) turns off the motor. |
The axis have to be provided by the user.
| axis | list of axis vectors and power. If empty then the motor is disabled. Power is the maximum force or torque that the motor will use to achieve the desired velocity. This must always be greater than or equal to zero. Setting this to zero (the default value) turns off the motor. |
|
inlinevirtual |
|
overridevirtual |
returns the speed (PositionRate) at the given axis, or zero if the axis is out of range The problem is, that we don't have actual information available.
returns the speed (PositionRate) at the given axis, or zero if the axis is out of range
So we return the last set position!.
Implements AngularMotor.
|
overridevirtual |
returns the number of Axis of this Motor
Implements AngularMotor.
initialises motor with body of robot
Reimplemented from AngularMotor.
|
virtual |
sets the desired speed of the motor at the given axis.
| velocity | Desired motor velocity (this will be an angular or linear velocity). |
| axisNumber | either 0 or 1 |
| velocity | Desired motor velocity (this will be an angular or linear velocity). |
Implements AngularMotor.
|
virtual |
sets the maximal force the motor has
Implements AngularMotor.
|
protected |
 1.8.6
1.8.6 
