|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
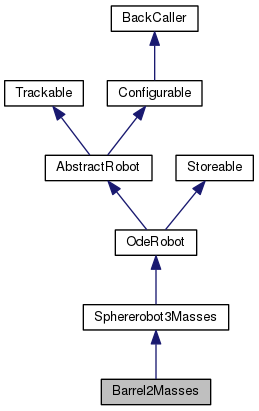
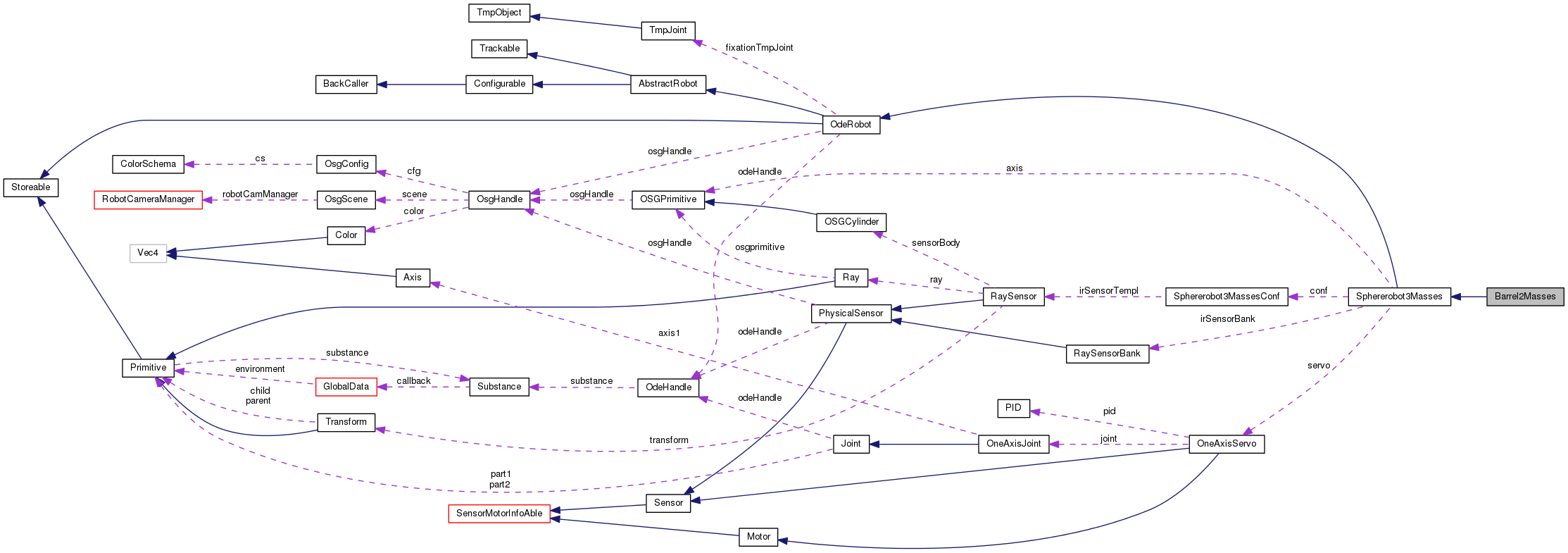
A barrel-like robot with 2 internal masses, which can slide on their orthogonal axes. More...
#include <barrel2masses.h>
Public Member Functions | |
| Barrel2Masses (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Sphererobot3MassesConf &conf, const std::string &name, double transparency=0.5) | |
| Constructor. More... | |
| virtual | ~Barrel2Masses () |
| virtual int | getSensorsIntern (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. More... | |
 Public Member Functions inherited from Sphererobot3Masses Public Member Functions inherited from Sphererobot3Masses | |
| Sphererobot3Masses (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Sphererobot3MassesConf &conf, const std::string &name, double transparency=0.5) | |
| constructor More... | |
| virtual | ~Sphererobot3Masses () |
| virtual void | update () |
| update the OSG notes here, if overwritten, call OdeRobot::update()! More... | |
| virtual void | placeIntern (const osg::Matrix &pose) |
| wrapper to for More... | |
| virtual void | doInternalStuff (GlobalData &globalData) |
| this function is called in each simulation timestep (always after control). More... | |
| virtual void | sense (GlobalData &globalData) override |
| this function is called each controlstep before control. More... | |
| virtual void | setMotorsIntern (const double *motors, int motornumber) |
| overload this function in a subclass to do specific sensor handling, not needed for generic motors More... | |
| virtual int | getMotorNumberIntern () |
| overload this function in a subclass to specific the number of custom sensors More... | |
| virtual int | getSensorNumberIntern () |
| overload this function in a subclass to specific the number of custom sensors More... | |
| virtual void | notifyOnChange (const paramkey &key) |
| Is called when a parameter was changes via setParam(). More... | |
| Public Member Functions inherited from OdeRobot | |
| OdeRobot (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const std::string &name, const std::string &revision) | |
| Constructor. More... | |
| virtual | ~OdeRobot () |
| calls cleanup() More... | |
| virtual int | getSensors (double *sensors, int sensornumber) final |
| returns actual sensorvalues More... | |
| virtual void | setMotors (const double *motors, int motornumber) final |
| sets actual motorcommands More... | |
| virtual int | getSensorNumber () final |
| returns number of sensors More... | |
| virtual int | getMotorNumber () final |
| returns number of motors More... | |
| virtual std::list < SensorMotorInfo > | getSensorInfos () override |
| returns the information for the sensors. More... | |
| virtual std::list < SensorMotorInfo > | getMotorInfos () override |
| returns the information for the motors. More... | |
| virtual void | addSensor (std::shared_ptr< Sensor > sensor, Attachment attachment=Attachment()) |
| adds a sensor to the robot. More... | |
| virtual void | addMotor (std::shared_ptr< Motor > motor, Attachment attachment=Attachment()) |
| adds a motor to the robot. More... | |
| virtual std::list < SensorAttachment > | getAttachedSensors () |
| returns all generic sensors with their attachment More... | |
| virtual std::list < MotorAttachment > | getAttachedMotors () |
| returns all generic motors with their attachment More... | |
| virtual void | addTorqueSensors (double maxtorque=1.0, int avg=1) |
| adds a torque sensor to each joint. Call it after placement of robot. More... | |
| virtual void | place (const Pos &pos) final |
| sets the vehicle to position pos More... | |
| virtual void | place (const osg::Matrix &pose) final |
| sets the pose of the vehicle More... | |
| virtual bool | collisionCallback (void *data, dGeomID o1, dGeomID o2) |
| virtual void | setColor (const Color &col) |
| sets color of the robot More... | |
| virtual Position | getPosition () const |
| returns position of the object More... | |
| virtual Position | getSpeed () const |
| returns linear speed vector of the object More... | |
| virtual Position | getAngularSpeed () const |
| returns angular velocity vector of the object More... | |
| virtual matrix::Matrix | getOrientation () const |
| returns the orientation of the object More... | |
| virtual Primitive * | getMainPrimitive () const |
| return the primitive of the robot that is used for tracking and camera following More... | |
| virtual Primitives | getAllPrimitives () const |
| returns a list of all primitives of the robot (used to store and restore the robot) More... | |
| virtual Primitives & | getAllPrimitives () |
| virtual Joints | getAllJoints () const |
| returns a list of all primitives of the robot (const version) (used to store and restore the robot) More... | |
| virtual Joints & | getAllJoints () |
| virtual bool | store (FILE *f) const |
| returns a list of all joints of the robot (const version) More... | |
| virtual bool | restore (FILE *f) |
| loads the object from the given file stream (ASCII preferred). More... | |
| virtual void | moveToPosition (Pos pos=Pos(0, 0, 0.5), int primitiveID=-1) |
| relocates robot such its primitive with the given ID is at the new postion (keep current pose). More... | |
| virtual void | moveToPose (Pose pose, int primitiveID=-1) |
| relocates robot such its primitive with the given ID is at the new pose (keep relative pose of all primitives). More... | |
| virtual Pose | getInitialPose () |
| returns the initial pose of the main primitive (use it e.g. with moveToPose) More... | |
| virtual Pose | getRelativeInitialPose () |
| returns the initial relative pose of the main primitive (use it with moveToPose to further translate or rotate). More... | |
| virtual void | fixate (GlobalData &global, int primitiveID=-1, double duration=0) |
| fixates the given primitive of the robot at its current position to the world for a certain time. More... | |
| virtual bool | unFixate (GlobalData &global) |
| release the robot in case it is fixated and return true in this case More... | |
| Public Member Functions inherited from AbstractRobot | |
| AbstractRobot (const std::string &name="abstractRobot", const std::string &revision="$ID$") | |
| Constructor. More... | |
| virtual | ~AbstractRobot () |
| virtual std::string | getTrackableName () const |
| returns name of trackable More... | |
| Public Member Functions inherited from Trackable | |
| Trackable () | |
| Constructor. More... | |
| virtual | ~Trackable () |
| Public Member Functions inherited from Configurable | |
| Configurable () | |
| Configurable (const std::string &name, const std::string &revision) | |
| intialise with name and revision (use "$ID$") More... | |
| virtual | ~Configurable () |
| virtual void | addParameter (const paramkey &key, paramval *val, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| This is the new style for adding configurable parameters. More... | |
| virtual void | addParameter (const paramkey &key, paramval *val, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val, paramval minBound, paramval maxBound, const paramdescr& descr) More... | |
| virtual void | addParameter (const paramkey &key, parambool *val, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val) but for bool values. More... | |
| virtual void | addParameter (const paramkey &key, paramint *val, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| See addParameter(const paramkey& key, paramval* val) but for int values. More... | |
| virtual void | addParameter (const paramkey &key, paramint *val, const paramdescr &descr=paramdescr()) |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, paramval minBound, paramval maxBound, const paramdescr &descr=paramdescr()) |
| This function is only provided for convenience. More... | |
| virtual void | addParameterDef (const paramkey &key, paramval *val, paramval def, const paramdescr &descr=paramdescr()) |
| virtual void | addParameterDef (const paramkey &key, parambool *val, parambool def, const paramdescr &descr=paramdescr()) |
| See addParameterDef(const paramkey&, paramval*, paramval) More... | |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, paramint minBound, paramint maxBound, const paramdescr &descr=paramdescr()) |
| See addParameterDef(const paramkey&, paramval*, paramval) More... | |
| virtual void | addParameterDef (const paramkey &key, paramint *val, paramint def, const paramdescr &descr=paramdescr()) |
| virtual void | setParamDescr (const paramkey &key, const paramdescr &descr, bool traverseChildren=true) |
| sets a description for the given parameter More... | |
| int | getId () const |
| return the id of the configurable objects, which is created by random on initialisation More... | |
| virtual paramkey | getName () const |
| return the name of the object More... | |
| virtual paramkey | getRevision () const |
| returns the revision of the object More... | |
| virtual void | setName (const paramkey &name, bool callSetNameOfInspectable=true) |
| Sets the name of the configurable. More... | |
| virtual void | setRevision (const paramkey &revision) |
| sets the revision Hint: { return "$ID$"; } More... | |
| virtual paramval | getParam (const paramkey &key, bool traverseChildren=true) const |
| returns the value of the requested parameter or 0 (+ error message to stderr) if unknown. More... | |
| virtual bool | hasParam (const paramkey &key, bool traverseChildren=true) const |
| Returns if the requested parameter is part of the configurable or their children. More... | |
| virtual bool | setParam (const paramkey &key, paramval val, bool traverseChildren=true) |
| sets the value of the given parameter or does nothing if unknown. More... | |
| virtual void | setParamBounds (const paramkey &key, paramval minBound, paramval maxBound, bool traverseChildren=true) |
| Sets the bounds (minBound and maxBound) of the given parameter. More... | |
| virtual void | setParamBounds (const paramkey &key, paramint minBound, paramint maxBound, bool traverseChildren=true) |
| virtual void | setParamBounds (const paramkey &key, paramvalBounds bounds, bool traverseChildren=true) |
| virtual void | setParamBounds (const paramkey &key, paramintBounds bounds, bool traverseChildren=true) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. More... | |
| virtual std::list< paramkey > | getAllParamNames (bool traverseChildren=true) |
| returns all names that are configureable More... | |
| virtual parammap | getParamValMap () const |
| virtual paramintmap | getParamIntMap () const |
| virtual paramboolmap | getParamBoolMap () const |
| virtual paramdescr | getParamDescr (const paramkey &key, bool traverseChildren=true) const |
| returns the description for the given parameter More... | |
| virtual paramvalBounds | getParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual paramintBounds | getParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamDescr (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamvalBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | hasParamintBounds (const paramkey &key, bool traverseChildren=true) const |
| virtual bool | storeCfg (const char *filenamestem, const std::list< std::string > &comments=std::list< std::string >()) |
| stores the key values paires into the file : filenamestem.cfg including the comments given in the list More... | |
| virtual bool | restoreCfg (const char *filenamestem) |
| restores the key values paires from the file : filenamestem.cfg More... | |
| void | print (FILE *f, const char *prefix, int columns=90, bool traverseChildren=true) const |
| prints the keys, values and descriptions to the file. Each line is prefixed More... | |
| bool | parse (FILE *f, const char *prefix=0, bool traverseChildren=true) |
| parses the configuration from the given file More... | |
| virtual void | addConfigurable (Configurable *conf) |
| Adds a configurable as a child object. More... | |
| virtual void | removeConfigurable (Configurable *conf) |
| Removes a configurable as a child object. More... | |
| virtual const configurableList & | getConfigurables () const |
| Returns the list containing all configurable children. More... | |
| virtual void | configurableChanged () |
| Indicates that the configurable itself or the configurable children attached to this configurable have changed. More... | |
| Public Member Functions inherited from BackCaller | |
| BackCaller () | |
| virtual | ~BackCaller () |
| virtual void | addCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Adds a Callbackable instance to this caller instance. More... | |
| virtual void | removeCallbackable (Callbackable *callbackableInstance, CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Removes a Callbackable instance from this caller instance. More... | |
| virtual void | removeAllCallbackables (CallbackableType type) |
| Removes all Callbackable instances from this caller instance. More... | |
| virtual void | callBack (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Calls all registered callbackable classes of the determined type. More... | |
| virtual void | callBackQMP (CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE) |
| Calls all registered callbackable classes of the determined type. More... | |
| Public Member Functions inherited from Storeable | |
| virtual | ~Storeable () |
| bool | storeToFile (const char *filename) const |
| Provided for convenience. More... | |
| bool | restoreFromFile (const char *filename) |
| Provided for convenience. More... | |
Static Public Member Functions | |
| static Sphererobot3MassesConf | getDefaultConf () |
| default configuration. More... | |
| Static Public Member Functions inherited from Sphererobot3Masses | |
| static Sphererobot3MassesConf | getDefaultConf () |
| default configuration More... | |
Protected Member Functions | |
| virtual void | create (const osg::Matrix &pose) |
| The cylinder (main body) lies on the ground, that it is rotating about the z-axis. More... | |
| Protected Member Functions inherited from Sphererobot3Masses | |
| Sphererobot3Masses (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Sphererobot3MassesConf &conf, const std::string &name, const std::string &revision, double transparency) | |
| constructor for children More... | |
| void | init () |
| initialises some internal variables More... | |
| virtual void | destroy () |
| destroys vehicle and space More... | |
| Protected Member Functions inherited from OdeRobot | |
| void | attachSensor (SensorAttachment &sa) |
| void | attachMotor (MotorAttachment &ma) |
| virtual void | cleanup () |
| deletes all objects (primitives) and joints (is called automatically in destructor) More... | |
| Protected Member Functions inherited from Configurable | |
| void | copyParameters (const Configurable &, bool traverseChildren=true) |
| copies the internal params of the given configurable More... | |
| void | printdescr (FILE *f, const char *prefix, const paramkey &key, int columns, int indent) const |
Additional Inherited Members | |
| Public Types inherited from Sphererobot3Masses | |
| enum | parts { Base, Pendular1, Pendular2, Pendular3, Last } |
| enum for the objects of the robot More... | |
| Public Types inherited from AbstractRobot | |
| typedef double | sensor |
| typedef double | motor |
| Public Types inherited from Configurable | |
| typedef std::string | paramkey |
| typedef std::string | paramdescr |
| typedef double | paramval |
| typedef std::list< std::pair < paramkey, paramval > > | paramlist |
| typedef std::map< paramkey, paramval * > | parammap |
| typedef bool | parambool |
| typedef std::list< std::pair < paramkey, parambool > > | paramboollist |
| typedef std::map< paramkey, parambool * > | paramboolmap |
| typedef int | paramint |
| typedef std::list< std::pair < paramkey, paramint > > | paramintlist |
| typedef std::map< paramkey, paramint * > | paramintmap |
| typedef std::map< paramkey, paramdescr > | paramdescrmap |
| typedef std::pair< paramval, paramval > | paramvalBounds |
| typedef std::map< paramkey, paramvalBounds > | paramvalBoundsMap |
| typedef std::pair< paramint, paramint > | paramintBounds |
| typedef std::map< paramkey, paramintBounds > | paramintBoundsMap |
| typedef std::pair< paramkey, paramval * > | paramvalpair |
| typedef std::pair< paramkey, parambool * > | paramboolpair |
| typedef std::pair< paramkey, paramint * > | paramintpair |
| typedef std::vector < Configurable * > | configurableList |
| Public Types inherited from BackCaller | |
| typedef unsigned long | CallbackableType |
| Static Public Attributes inherited from Configurable | |
| static const CallbackableType | CALLBACK_CONFIGURABLE_CHANGED = 11 |
| Static Public Attributes inherited from BackCaller | |
| static const CallbackableType | DEFAULT_CALLBACKABLE_TYPE = 0 |
| This is the default Callbackable type. More... | |
| Static Protected Member Functions inherited from OdeRobot | |
| static bool | isGeomInPrimitiveList (Primitive **ps, int len, dGeomID geom) |
| static bool | isGeomInPrimitiveList (std::list< Primitive * > ps, dGeomID geom) |
| Protected Attributes inherited from Sphererobot3Masses | |
| unsigned int | numberaxis |
| SliderServo * | servo [servono] |
| OSGPrimitive * | axis [servono] |
| Sphererobot3MassesConf | conf |
| RaySensorBank | irSensorBank |
| a collection of ir sensors More... | |
| double | transparency |
| bool | created |
| Protected Attributes inherited from OdeRobot | |
| Primitives | objects |
| list of objects (should be populated by subclasses) More... | |
| Joints | joints |
| list of joints (should be populated by subclasses) More... | |
| std::list< SensorAttachment > | sensors |
| std::list< MotorAttachment > | motors |
| TmpJoint * | fixationTmpJoint |
| Pose | initialPose |
| Pose | initialRelativePose |
| OdeHandle | odeHandle |
| OsgHandle | osgHandle |
| dSpaceID | parentspace |
| bool | initialized |
| bool | askedfornumber |
| Static Protected Attributes inherited from Sphererobot3Masses | |
| static const int | servono =3 |
A barrel-like robot with 2 internal masses, which can slide on their orthogonal axes.
It is the small brother of the Sphererobot3Masses. This robot was inspired by Julius Popp (http://sphericalrobots.com)
| Barrel2Masses | ( | const OdeHandle & | odeHandle, |
| const OsgHandle & | osgHandle, | ||
| const Sphererobot3MassesConf & | conf, | ||
| const std::string & | name, | ||
| double | transparency = 0.5 |
||
| ) |
Constructor.
constructor
It is configured with the configuration object of Sphererobot3Masses. Just two of the 3 axis are used. The worldZaxissensor and irAxis3 has no meaning here.
|
virtual |
|
protectedvirtual |
The cylinder (main body) lies on the ground, that it is rotating about the z-axis.
Reimplemented from Sphererobot3Masses.
|
inlinestatic |
default configuration.
It has no sensors. Use addSensor(std::make_shared<Sensor>(AxisOrientationSensor(ZProjectionXY)) for example.
|
virtual |
Writes the sensor values to an array in the memory.
| sensor* | pointer to the array |
| sensornumber | length of the sensor array |
Reimplemented from Sphererobot3Masses.
 1.8.6
1.8.6 
