|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
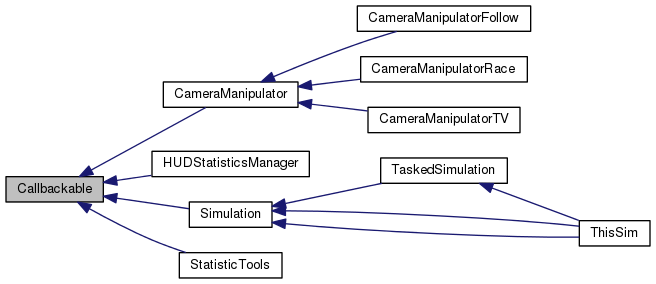
Interface class for a class which wants to be callback on a certain action. More...
#include <callbackable.h>
Public Member Functions | |
| Callbackable () | |
| virtual | ~Callbackable () |
| virtual void | doOnCallBack (BackCaller *source, BackCaller::CallbackableType type=BackCaller::DEFAULT_CALLBACKABLE_TYPE)=0 |
| This method is invoked when a callback is done from the class where this class is for callback registered. More... | |
Interface class for a class which wants to be callback on a certain action.
In lpzRobots this should be the most case when the time loop is going to the next step.
NEW since 20090731: Use the class BackCaller to get already implemented functions like addCallbackable(...).
|
inline |
|
inlinevirtual |
|
pure virtual |
This method is invoked when a callback is done from the class where this class is for callback registered.
| source | the caller instance which did the callback. |
| type | this type can be used to differ from varying types of callback. |
Implemented in HUDStatisticsManager, Simulation, StatisticTools, and CameraManipulator.
 1.8.6
1.8.6 
