|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
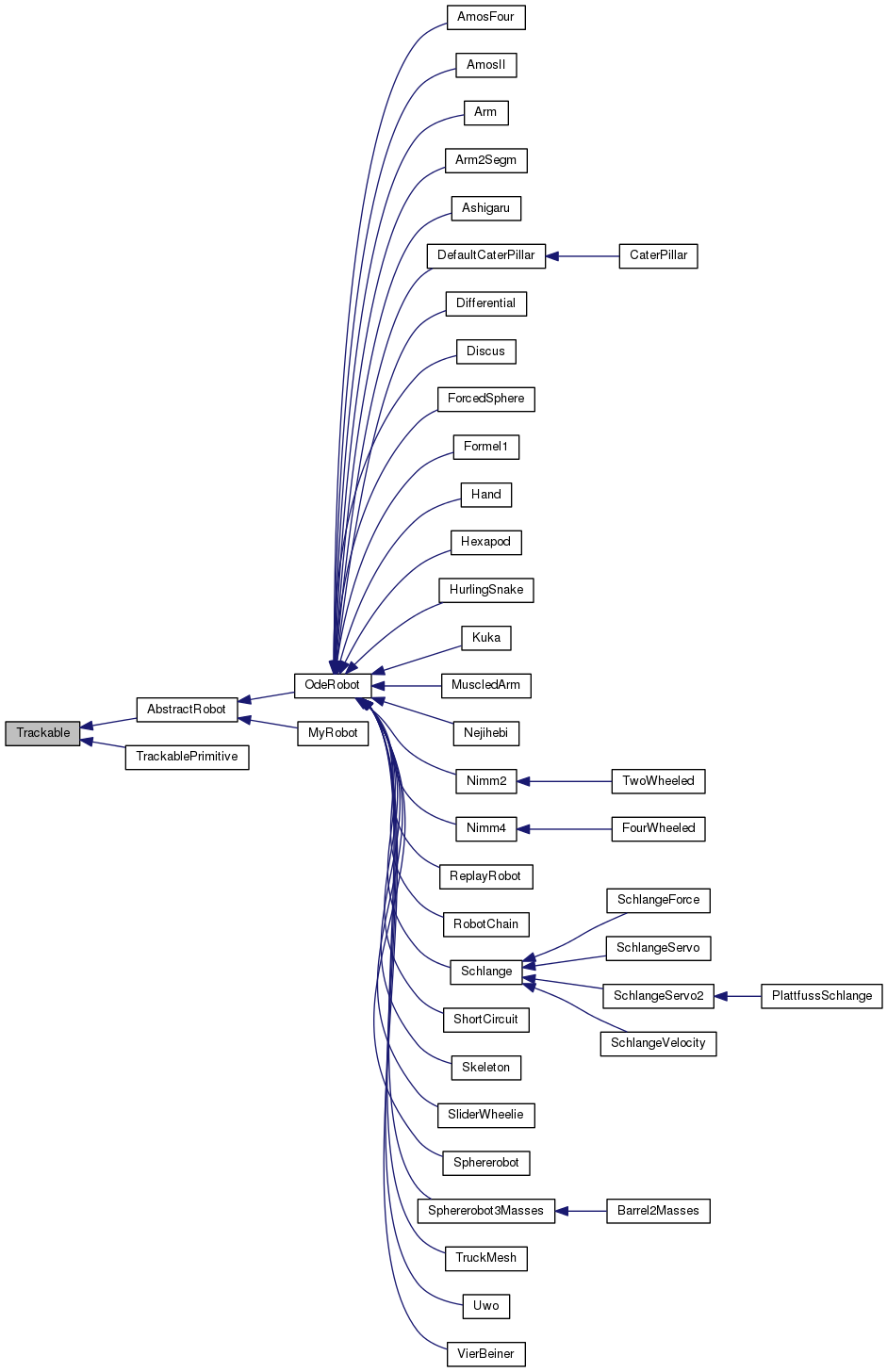
Abstract class (interface) for trackable objects (used for robots) More...
#include <trackable.h>
Public Member Functions | |
| Trackable () | |
| Constructor. More... | |
| virtual | ~Trackable () |
| virtual std::string | getTrackableName () const =0 |
| returns name of trackable More... | |
| virtual Position | getPosition () const =0 |
| returns position of the object More... | |
| virtual Position | getSpeed () const =0 |
| returns linear speed vector of the object More... | |
| virtual Position | getAngularSpeed () const =0 |
| returns angular velocity vector of the object More... | |
| virtual matrix::Matrix | getOrientation () const =0 |
| returns the orientation of the object More... | |
Abstract class (interface) for trackable objects (used for robots)
|
inline |
Constructor.
|
inlinevirtual |
|
pure virtual |
returns angular velocity vector of the object
Implemented in TrackablePrimitive, OdeRobot, and MyRobot.
|
pure virtual |
returns the orientation of the object
Implemented in TrackablePrimitive, OdeRobot, and MyRobot.
|
pure virtual |
returns position of the object
Implemented in TrackablePrimitive, OdeRobot, and MyRobot.
|
pure virtual |
returns linear speed vector of the object
Implemented in TrackablePrimitive, OdeRobot, and MyRobot.
|
pure virtual |
returns name of trackable
Implemented in TrackablePrimitive, and AbstractRobot.
 1.8.6
1.8.6 
