#include <simulation.h>
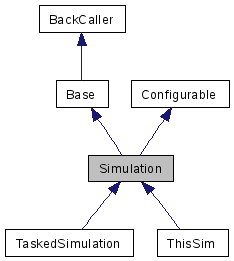
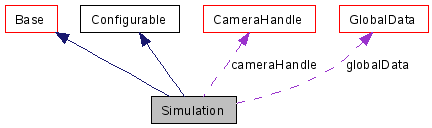
Inherits Base, and Configurable.
Inherited by TaskedSimulation, and ThisSim.
Inheritance diagram for Simulation:
Public Types | |
| none | |
| initialised | |
| running | |
| closed | |
| enum | SimulationState { none, initialised, running, closed } |
Public Member Functions | |
| Simulation () | |
| virtual | ~Simulation () |
| bool | run (int argc, char **argv) |
| starts the Simulation. | |
| virtual void | start (const OdeHandle &, const OsgHandle &, GlobalData &globalData)=0 |
| start() is called at the first start of the cycles and should create all the object (obstacles, agents...). | |
| virtual bool | restart (const OdeHandle &, const OsgHandle &, GlobalData &globalData) |
| restart() is called at the second and all following starts of the cylces | |
| virtual void | end (GlobalData &globalData) |
| end() is called at the end and should tidy up | |
| virtual bool | config (GlobalData &globalData) |
| config() is called when the user presses Ctrl-C | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down) |
| is called if a key was pressed. | |
| virtual void | bindingDescription (osg::ApplicationUsage &au) const |
| this can be used to describe the key bindings used by command() | |
| virtual bool | collCallback (const OdeHandle &, void *data, dGeomID o1, dGeomID o2) |
| collCallback() can be used to overload the standart collision handling. | |
| virtual void | addCallback (GlobalData &globalData, bool draw, bool pause, bool control) |
| optional additional callback function which is called every simulation step. | |
| virtual void | odeStep () |
| virtual void | osgStep () |
Protected Member Functions | |
| virtual bool | handle (const osgGA::GUIEventAdapter &ea, osgGA::GUIActionAdapter &) |
| virtual void | getUsage (osg::ApplicationUsage &au) const |
| virtual void | accept (osgGA::GUIEventHandlerVisitor &v) |
| virtual bool | init (int argc, char **argv) |
| void | setCameraHomePos (const osg::Vec3 &eye, const osg::Vec3 &view) |
| define the home position and view orientation of the camera. | |
| bool | control_c_pressed () |
| virtual void | processCmdLine (int argc, char **argv) |
| void | resetSyncTimer () |
| long | timeOfDayinMS () |
Static Protected Member Functions | |
| static void | nearCallback_TopLevel (void *data, dGeomID o1, dGeomID o2) |
| static void | nearCallback (void *data, dGeomID o1, dGeomID o2) |
Protected Attributes | |
| std::list< PlotOption > & | plotoptions |
| std::list< Configurable * > & | globalconfigurables |
| this list contains by default only the odeconfig. This list should be added to new agents | |
| GlobalData | globalData |
| osg::ref_ptr< VideoStream > | videostream |
| int | nextLeakAnnounce |
| int | leakAnnCounter |
| long | realtimeoffset |
| long | simtimeoffset |
| double | truerealtimefactor |
| bool | justresettimes |
| paramint | windowWidth |
| paramint | windowHeight |
| bool | pause |
| bool | simulation_time_reached |
| long int | simulation_time |
| bool | noGraphics |
| int | guiloggerinterval |
| int | filelogginginterval |
| int | neuronvizinterval |
| char | odeRobotsCfg [256] |
| int | currentCycle |
| the current cycle; the simulation restarts if restart() returns true | |
| CameraHandle | cameraHandle |
| parambool | useOdeThread |
| parambool | useOsgThread |
| parambool | useQMPThreads |
| parambool | inTaskedMode |
| std::string | windowName |
| enum SimulationState |
| Simulation | ( | ) |
| ~Simulation | ( | ) | [virtual] |
| void accept | ( | osgGA::GUIEventHandlerVisitor & | v | ) | [protected, virtual] |
| virtual void addCallback | ( | GlobalData & | globalData, | |
| bool | draw, | |||
| bool | pause, | |||
| bool | control | |||
| ) | [inline, virtual] |
optional additional callback function which is called every simulation step.
Called between physical simulation step and drawing.
| draw | indicates that objects are drawn in this timestep | |
| pause | always false (only called of simulation is running) | |
| control | indicates that robots have been controlled this timestep |
| virtual void bindingDescription | ( | osg::ApplicationUsage & | au | ) | const [inline, virtual] |
| virtual bool collCallback | ( | const OdeHandle & | , | |
| void * | data, | |||
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [inline, virtual] |
collCallback() can be used to overload the standart collision handling.
However it is called after the robots collision handling.
| virtual bool command | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData, | |||
| int | key, | |||
| bool | down | |||
| ) | [inline, virtual] |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
Reimplemented in ThisSim.
| bool config | ( | GlobalData & | globalData | ) | [virtual] |
| bool control_c_pressed | ( | ) | [protected] |
| void end | ( | GlobalData & | globalData | ) | [virtual] |
end() is called at the end and should tidy up
| void getUsage | ( | osg::ApplicationUsage & | au | ) | const [protected, virtual] |
| bool handle | ( | const osgGA::GUIEventAdapter & | ea, | |
| osgGA::GUIActionAdapter & | ||||
| ) | [protected, virtual] |
| bool init | ( | int | argc, | |
| char ** | argv | |||
| ) | [protected, virtual] |
| void nearCallback | ( | void * | data, | |
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [static, protected] |
| void nearCallback_TopLevel | ( | void * | data, | |
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [static, protected] |
| void odeStep | ( | ) | [virtual] |
| void osgStep | ( | ) | [virtual] |
| void processCmdLine | ( | int | argc, | |
| char ** | argv | |||
| ) | [protected, virtual] |
| void resetSyncTimer | ( | ) | [protected] |
| bool restart | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData | |||
| ) | [virtual] |
restart() is called at the second and all following starts of the cylces
| the | odeHandle | |
| the | osgHandle | |
| globalData |
| bool run | ( | int | argc, | |
| char ** | argv | |||
| ) |
starts the Simulation.
Do not overload it. This function returns of the simulation is terminated.
define the home position and view orientation of the camera.
view.x is the heading angle in degree. view.y is the tilt angle in degree (nick), view.z is ignored
| virtual void start | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData | |||
| ) | [pure virtual] |
| long timeOfDayinMS | ( | ) | [protected] |
CameraHandle cameraHandle [protected] |
int currentCycle [protected] |
the current cycle; the simulation restarts if restart() returns true
int filelogginginterval [protected] |
std::list<Configurable*>& globalconfigurables [protected] |
this list contains by default only the odeconfig. This list should be added to new agents
GlobalData globalData [protected] |
int guiloggerinterval [protected] |
parambool inTaskedMode [protected] |
bool justresettimes [protected] |
int leakAnnCounter [protected] |
int neuronvizinterval [protected] |
int nextLeakAnnounce [protected] |
bool noGraphics [protected] |
char odeRobotsCfg[256] [protected] |
bool pause [protected] |
std::list<PlotOption>& plotoptions [protected] |
long realtimeoffset [protected] |
long simtimeoffset [protected] |
long int simulation_time [protected] |
bool simulation_time_reached [protected] |
double truerealtimefactor [protected] |
parambool useOdeThread [protected] |
parambool useOsgThread [protected] |
parambool useQMPThreads [protected] |
osg::ref_ptr<VideoStream> videostream [protected] |
paramint windowHeight [protected] |
std::string windowName [protected] |
paramint windowWidth [protected] |
 1.4.7
1.4.7