#include <globaldata.h>
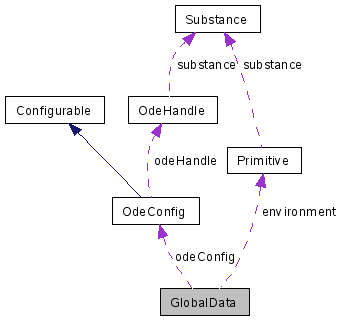
Collaboration diagram for GlobalData:
Public Member Functions | |
| GlobalData () | |
Public Attributes | |
| OdeConfig | odeConfig |
| ConfigList | configs |
| ObstacleList | obstacles |
| OdeAgentList | agents |
| Primitive * | environment |
| SoundList | sounds |
| < this is used to be able to attach objects to the static environment sound space | |
| PlotOptionList | plotoptions |
| plotoptions used for new agents | |
| std::list< Configurable * > | globalconfigurables |
| global configurables plotted by all agents | |
| double | time |
| long int | sim_step |
| time steps since start | |
| GlobalData | ( | ) | [inline] |
| std::list<Configurable*> globalconfigurables |
global configurables plotted by all agents
plotoptions used for new agents
| long int sim_step |
time steps since start
| double time |
 1.4.7
1.4.7