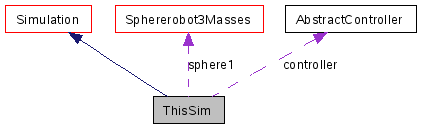
Inheritance diagram for ThisSim:
Public Member Functions | |
| void | start (const OdeHandle &odeHandle, const OsgHandle &osgHandle, GlobalData &global) |
| start() is called at the first start of the cycles and should create all the object (obstacles, agents...). | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down) |
| is called if a key was pressed. | |
| virtual void | bindingDescription (osg::ApplicationUsage &au) const |
| this can be used to describe the key bindings used by command() | |
Public Attributes | |
| AbstractController * | controller |
| Sphererobot3Masses * | sphere1 |
| virtual void bindingDescription | ( | osg::ApplicationUsage & | au | ) | const [inline, virtual] |
| virtual bool command | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData, | |||
| int | key, | |||
| bool | down | |||
| ) | [inline, virtual] |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
Reimplemented from Simulation.
| void start | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| GlobalData & | global | |||
| ) | [inline, virtual] |
start() is called at the first start of the cycles and should create all the object (obstacles, agents...).
Implements Simulation.
 1.4.7
1.4.7