#include <taskedsimulation.h>
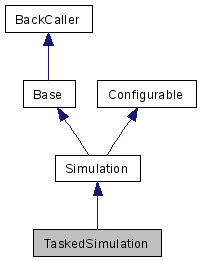
Inherits Simulation.
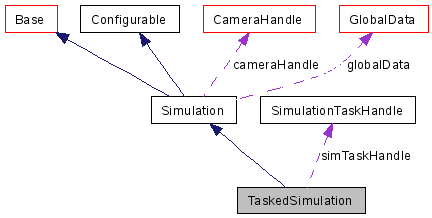
Inheritance diagram for TaskedSimulation:
Public Member Functions | |
| TaskedSimulation () | |
| virtual | ~TaskedSimulation () |
| virtual void | start (const OdeHandle &, const OsgHandle &, GlobalData &globalData, SimulationTaskHandle &simTaskHandle, int taskId) |
| start() is called at the first start of the cycles and should create all the object (obstacles, agents...). | |
| virtual bool | restart (const OdeHandle &, const OsgHandle &, GlobalData &globalData, SimulationTaskHandle &, int taskId) |
| restart() is called at the second and all following starts of the cylce The end of a cycle is determined by (simulation_time_reached==true) | |
| virtual void | addCallback (GlobalData &globalData, bool draw, bool pause, bool control, SimulationTaskHandle &, int taskId) |
| optional additional callback function which is called every simulation step. | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down, SimulationTaskHandle &, int taskId) |
| is called if a key was pressed. | |
| void | setTaskId (int taskId) |
| Sets the taskId of the associated SimulationTask. | |
| void | setTaskNameSuffix (std::string nameSuffix) |
| void | setSimTaskHandle (SimulationTaskHandle &simTaskHandle) |
| Sets the global SimulationTaskHandle. | |
| TaskedSimulation | ( | ) | [inline] |
| virtual ~TaskedSimulation | ( | ) | [inline, virtual] |
| virtual void addCallback | ( | GlobalData & | globalData, | |
| bool | draw, | |||
| bool | pause, | |||
| bool | control, | |||
| SimulationTaskHandle & | , | |||
| int | taskId | |||
| ) | [inline, virtual] |
optional additional callback function which is called every simulation step.
Called between physical simulation step and drawing.
| draw | indicates that objects are drawn in this timestep | |
| pause | always false (only called of simulation is running) | |
| control | indicates that robots have been controlled this timestep |
| virtual bool command | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData, | |||
| int | key, | |||
| bool | down, | |||
| SimulationTaskHandle & | , | |||
| int | taskId | |||
| ) | [inline, virtual] |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
| virtual bool restart | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData, | |||
| SimulationTaskHandle & | , | |||
| int | taskId | |||
| ) | [inline, virtual] |
restart() is called at the second and all following starts of the cylce The end of a cycle is determined by (simulation_time_reached==true)
| the | odeHandle | |
| the | osgHandle | |
| globalData |
| void setSimTaskHandle | ( | SimulationTaskHandle & | simTaskHandle | ) | [inline] |
Sets the global SimulationTaskHandle.
This method is called by the associated SimulationTask.
| simTaskHandle |
| void setTaskId | ( | int | taskId | ) | [inline] |
Sets the taskId of the associated SimulationTask.
This method is called by the associated SimulationTask.
| taskId | of the associated SimulationTask |
| void setTaskNameSuffix | ( | std::string | nameSuffix | ) | [inline] |
| virtual void start | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData, | |||
| SimulationTaskHandle & | simTaskHandle, | |||
| int | taskId | |||
| ) | [inline, virtual] |
start() is called at the first start of the cycles and should create all the object (obstacles, agents...).
 1.4.7
1.4.7