#include <math.h>
#include <osgGA/GUIEventHandler>
#include <Producer/Camera>
#include <vector>
#include <iterator>
#include "odeconfig.h"
#include "camera.h"
#include "grabframe.h"
#include "globaldata.h"
#include "base.h"
#include "extendedViewer.h"
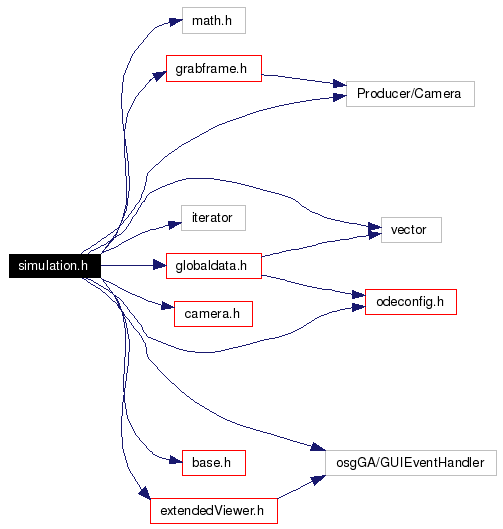
Include dependency graph for simulation.h:
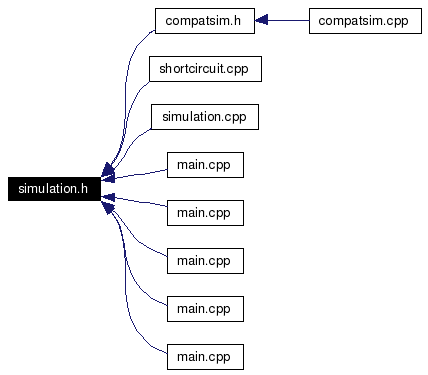
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | osg |
| namespace | lpzrobots |
Classes | |
| class | Simulation |
Defines | |
| #define | PI M_PI |
Functions | |
| int | lpzrobots::contains (char **list, int len, const char *str) |
| returns the index+1 if the list contains the given string or 0 if not | |
| void | lpzrobots::showParams (const ConfigList &configs) |
| shows all parameters of all given configurable objects | |
| void | lpzrobots::changeParams (ConfigList &configs) |
| offers the possibility to change parameter of all configurable objects | |
| void | lpzrobots::createNewDir (const char *base, char *newdir) |
| creates a new directory with the stem base, which is not yet there (using subsequent numbers) | |
|
|
Definition at line 135 of file simulation.h. |
 1.4.5
1.4.5