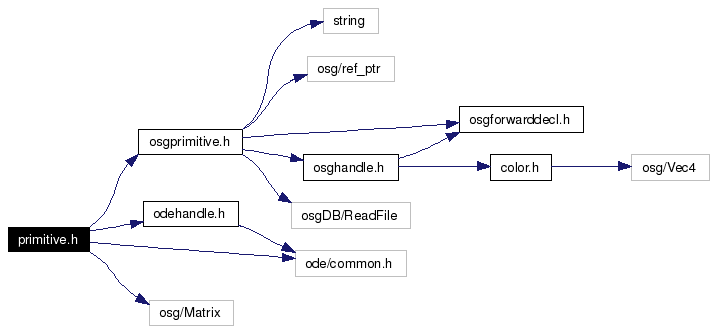
#include "osgprimitive.h"
#include "odehandle.h"
#include <osg/Matrix>
#include <ode/common.h>
Include dependency graph for primitive.h:
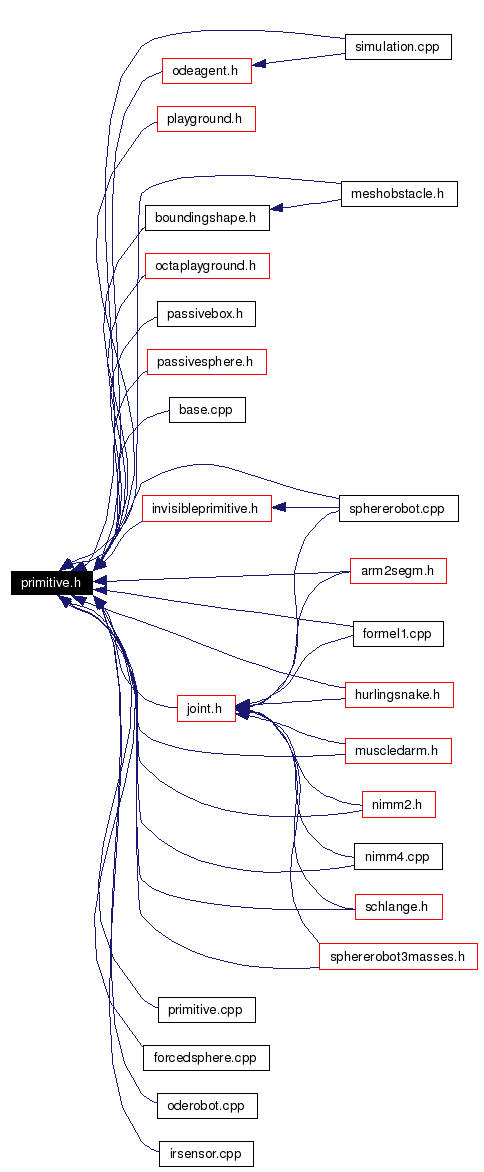
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | lpzrobots |
Classes | |
| class | Primitive |
| Interface class for primitives represented in the physical and graphical world. More... | |
| class | Plane |
| Plane primitive. More... | |
| class | Box |
| Box primitive. More... | |
| class | Sphere |
| Sphere primitive. More... | |
| class | Capsule |
| Capsule primitive. More... | |
| class | Transform |
| Primitive for transforming a geom (primitive without body) in respect to a body (primitive with body). More... | |
| class | DummyPrimitive |
| Dummy Primitive which returns 0 for geom and body. More... | |
Functions | |
| osg::Matrix | lpzrobots::osgPose (dGeomID geom) |
| returns the osg (4x4) pose matrix of the ode geom | |
| osg::Matrix | lpzrobots::osgPose (dBodyID body) |
| returns the osg (4x4) pose matrix of the ode body | |
| osg::Matrix | lpzrobots::osgPose (const double *position, const double *rotation) |
| converts a position vector and a rotation matrix from ode to osg 4x4 matrix | |
| void | lpzrobots::odeRotation (const osg::Matrix &pose, dMatrix3 &odematrix) |
| converts the rotation component of pose into an ode rotation matrix | |
 1.4.5
1.4.5