#include <component.h>
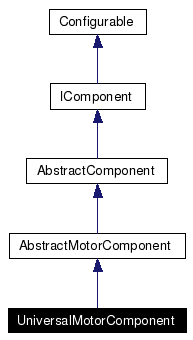
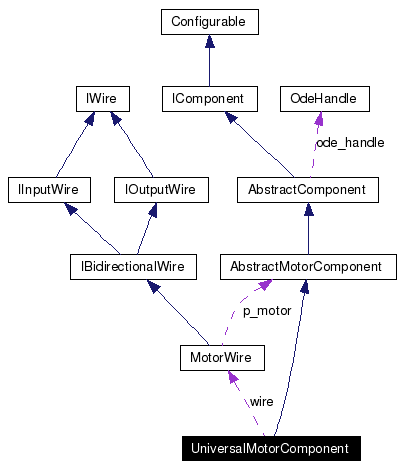
Inheritance diagram for UniversalMotorComponent:
a motor wrapper.
must be attached to one of the 2 axis of a universal joint
Definition at line 313 of file component.h.
Public Member Functions | |
| UniversalMotorComponent (dJointID _joint_id, char _axis) | |
| void | set_angular_velocity (dReal angular_velocity) |
| dReal | get_angular_velocity () const |
| unsigned | expose_wires (WireContainer &out_r_wire_container) |
| void | draw () const |
| bool | collision_callback (OdeHandle *p_ode_handle, dGeomID geom_id_0, dGeomID geom_id_1) const |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
| virtual paramval | getParam (const paramkey &key) const |
| virtual bool | setParam (const paramkey &key, paramval val) |
Protected Attributes | |
| char | axis |
| MotorWire | wire |
| bool | param_show_axis |
|
||||||||||||
|
|
|
||||||||||||||||
|
Implements IComponent. |
|
|
Implements IComponent. |
|
|
Reimplemented from AbstractComponent. |
|
|
Implements AbstractMotorComponent. |
|
|
Reimplemented from AbstractComponent. |
|
|
The list of all parameters with there value as allocated lists.
Reimplemented from AbstractComponent. |
|
|
Implements AbstractMotorComponent. |
|
||||||||||||
|
Reimplemented from AbstractComponent. |
|
|
Definition at line 315 of file component.h. |
|
|
Definition at line 319 of file component.h. |
|
|
Definition at line 317 of file component.h. |
 1.4.5
1.4.5