#include <component.h>
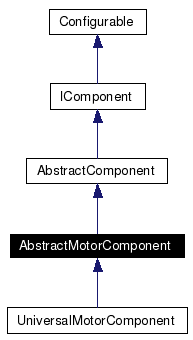
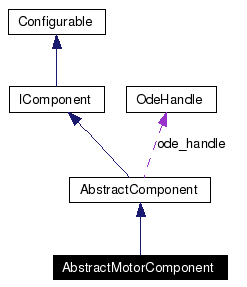
Inheritance diagram for AbstractMotorComponent:
a motor has output wires (new angular velocity) and input wire (current angular velocity)
Definition at line 273 of file component.h.
Public Member Functions | |
| AbstractMotorComponent (dJointID _joint_id) | |
| virtual void | set_angular_velocity (dReal angular_velocity)=0 |
| virtual dReal | get_angular_velocity () const =0 |
Protected Attributes | |
| dJointID | joint_id |
|
|
|
|
|
Implemented in UniversalMotorComponent. |
|
|
Implemented in UniversalMotorComponent. |
|
|
Definition at line 275 of file component.h. |
 1.4.5
1.4.5