#include <forcedsphere.h>
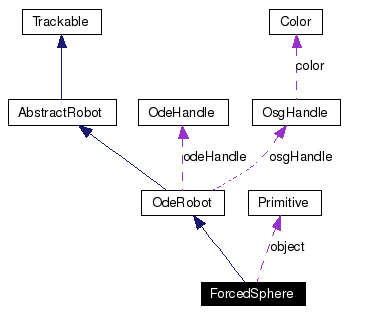
Inheritance diagram for ForcedSphere:
Definition at line 46 of file forcedsphere.h.
Public Member Functions | |
| ForcedSphere (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const char *name, double radius=1, double max_force=1) | |
| constructor | |
| virtual | ~ForcedSphere () |
| virtual void | update () |
| update all primitives and joints | |
| virtual void | place (const osg::Matrix &pose) |
| sets the pose of the vehicle | |
| virtual bool | collisionCallback (void *data, dGeomID o1, dGeomID o2) |
| This is the collision handling function for sphere robots. | |
| virtual void | doInternalStuff (const GlobalData &globalData) |
| this function is called in each timestep. | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. | |
| virtual void | setMotors (const motor *motors, int motornumber) |
| Reads the actual motor commands from an array, an sets all motors of the snake to this values. | |
| virtual int | getMotorNumber () |
| Returns the number of motors used by the snake. | |
| virtual int | getSensorNumber () |
| Returns the number of sensors used by the robot. | |
Protected Member Functions | |
| virtual Primitive * | getMainPrimitive () const |
| the main object of the robot, which is used for position and speed tracking | |
| virtual void | create (const osg::Matrix &pose) |
| creates vehicle at desired position | |
| virtual void | destroy () |
| destroys vehicle and space | |
Protected Attributes | |
| Primitive * | object [1] |
| double | radius |
| double | max_force |
| bool | created |
|
||||||||||||||||||||||||
|
constructor
Definition at line 57 of file forcedsphere.cpp. |
|
|
Definition at line 67 of file forcedsphere.cpp. |
|
||||||||||||||||
|
This is the collision handling function for sphere robots. This overwrides the function collisionCallback of the class robot.
Implements OdeRobot. Definition at line 127 of file forcedsphere.cpp. |
|
|
creates vehicle at desired position
Definition at line 152 of file forcedsphere.cpp. |
|
|
destroys vehicle and space
Definition at line 165 of file forcedsphere.cpp. |
|
|
this function is called in each timestep. It should perform robot-internal checks, like space-internal collision detection, sensor resets/update etc.
Implements OdeRobot. Definition at line 116 of file forcedsphere.cpp. |
|
|
the main object of the robot, which is used for position and speed tracking
Implements OdeRobot. Definition at line 118 of file forcedsphere.h. |
|
|
Returns the number of motors used by the snake.
Implements AbstractRobot. Definition at line 136 of file forcedsphere.cpp. |
|
|
Returns the number of sensors used by the robot.
Implements AbstractRobot. Definition at line 144 of file forcedsphere.cpp. |
|
||||||||||||
|
Writes the sensor values to an array in the memory.
Implements AbstractRobot. Definition at line 83 of file forcedsphere.cpp. |
|
|
sets the pose of the vehicle
Implements OdeRobot. Definition at line 109 of file forcedsphere.cpp. |
|
||||||||||||
|
Reads the actual motor commands from an array, an sets all motors of the snake to this values. It is an linear allocation.
Implements AbstractRobot. Definition at line 102 of file forcedsphere.cpp. |
|
|
update all primitives and joints
Implements OdeRobot. Definition at line 72 of file forcedsphere.cpp. |
|
|
Definition at line 52 of file forcedsphere.h. |
|
|
Definition at line 51 of file forcedsphere.h. |
|
|
Definition at line 49 of file forcedsphere.h. |
|
|
Definition at line 50 of file forcedsphere.h. |
 1.4.5
1.4.5