TwoWheeled Class Reference
Robot is based on nimm2 with a camera installed. More...
#include <twowheeled.h>
Inherits lpzrobots::Nimm2.
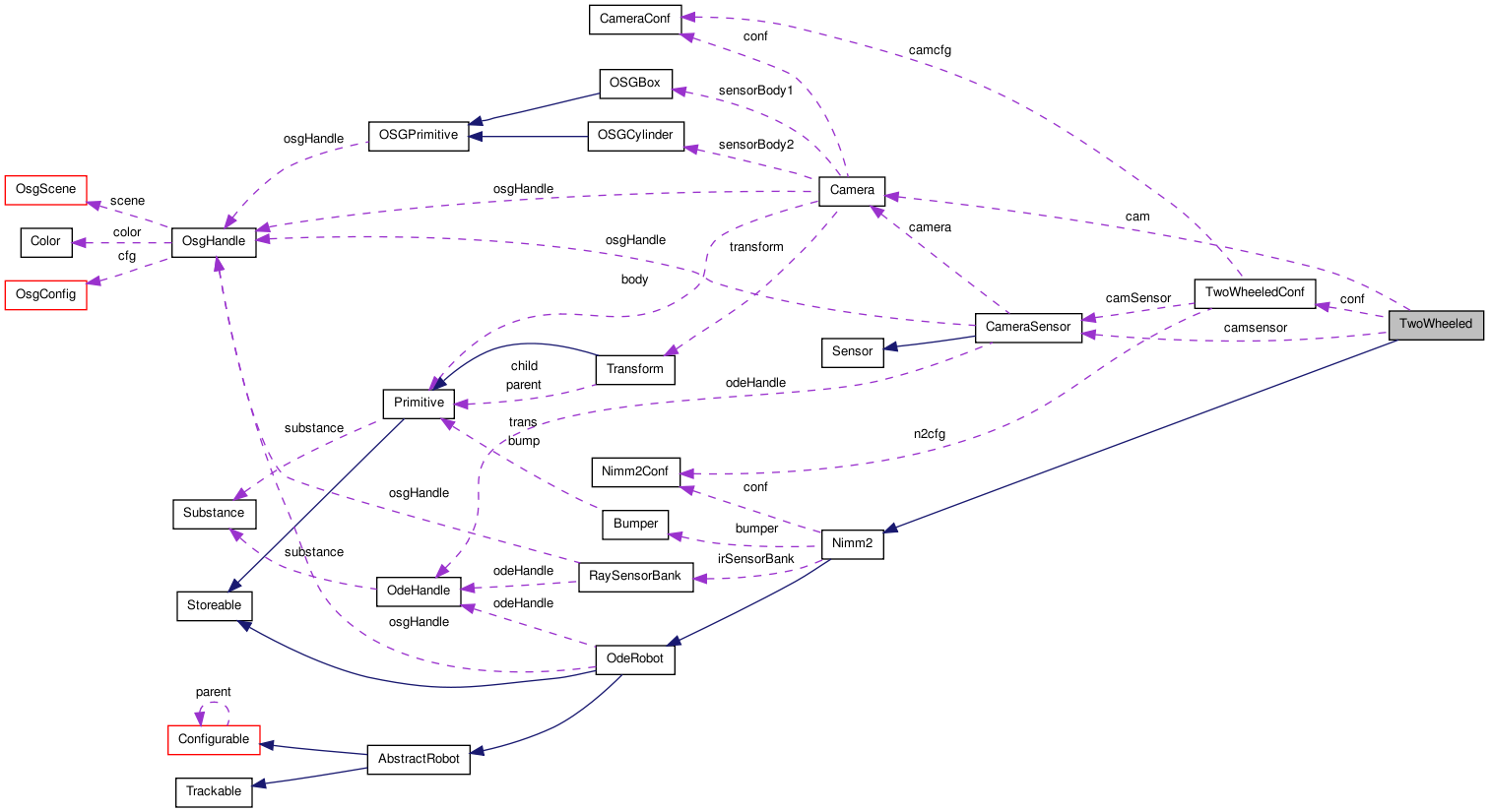
Collaboration diagram for TwoWheeled:
Public Member Functions | |
| TwoWheeled (const OdeHandle &odeHandle, const OsgHandle &osgHandle, TwoWheeledConf conf, const std::string &name) | |
| constructor of twowheeled robot | |
| virtual | ~TwoWheeled () |
| virtual void | update () |
| updates the OSG nodes of the vehicle | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| returns actual sensorvalues | |
| virtual void | sense (GlobalData &globalData) |
| this function is called each controlstep before control. | |
Static Public Member Functions | |
| static TwoWheeledConf | getDefaultConf () |
Protected Member Functions | |
| virtual void | create (const osg::Matrix &pose) |
| creates vehicle at desired pose | |
| virtual void | destroy () |
| destroys vehicle and space | |
Protected Attributes | |
| TwoWheeledConf | conf |
| Inspectable interface. | |
| CameraSensor * | camsensor |
| Camera * | cam |
Detailed Description
Robot is based on nimm2 with a camera installed.
Constructor & Destructor Documentation
| TwoWheeled | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| TwoWheeledConf | conf, | |||
| const std::string & | name | |||
| ) |
constructor of twowheeled robot
- Parameters:
-
odeHandle data structure for accessing ODE osgHandle ata structure for accessing OSG conf configuration structure name name of the robot
| ~TwoWheeled | ( | ) | [virtual] |
Member Function Documentation
| void create | ( | const osg::Matrix & | pose | ) | [protected, virtual] |
| void destroy | ( | ) | [protected, virtual] |
destroys vehicle and space
Reimplemented from Nimm2.
| static TwoWheeledConf getDefaultConf | ( | ) | [inline, static] |
Reimplemented from Nimm2.
| int getSensorNumber | ( | ) | [virtual] |
returns number of sensors
Reimplemented from Nimm2.
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
returns actual sensorvalues
- Parameters:
-
sensors sensors scaled to [-1,1] sensornumber length of the sensor array
- Returns:
- number of actually written sensors
- Parameters:
-
sensors sensors scaled to [-1,1] (more or less) sensornumber length of the sensor array
- Returns:
- number of actually written sensors
Reimplemented from Nimm2.
| void sense | ( | GlobalData & | globalData | ) | [virtual] |
| void update | ( | ) | [virtual] |
Member Data Documentation
CameraSensor* camsensor [protected] |
TwoWheeledConf conf [protected] |
Inspectable interface.
Reimplemented from Nimm2.
The documentation for this class was generated from the following files:
