TwoWheeledConf Struct Reference
#include <twowheeled.h>
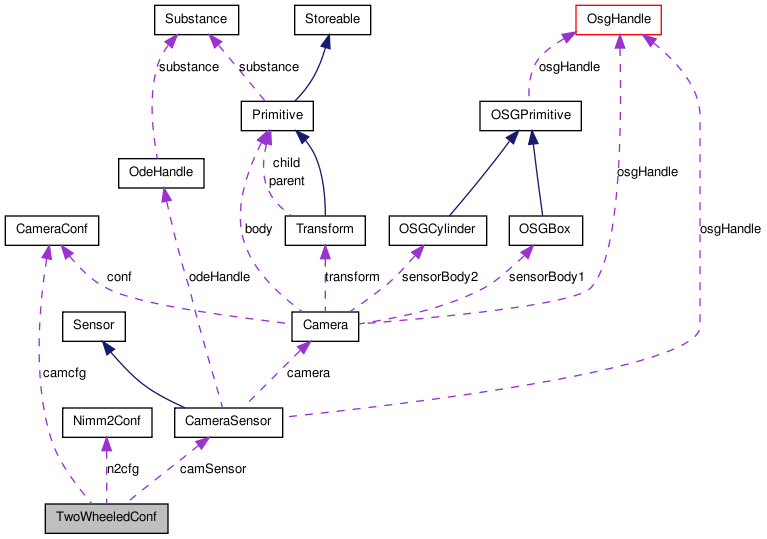
Collaboration diagram for TwoWheeledConf:
Public Member Functions | |
| void | addSensor (Sensor *s) |
| adds a sensor to the list of sensors | |
Public Attributes | |
| Nimm2Conf | n2cfg |
| configuration for underlying nimm2 robot | |
| CameraConf | camcfg |
| camera config. Allows to change the image processing | |
| bool | useCamera |
| whether to use the camera | |
| osg::Matrix | camPos |
| relative pose of the camera | |
| CameraSensor * | camSensor |
| camera sensor (converts image to sensor data) (if NULL then DirectCameraSensor() is used) | |
| std::list< Sensor * > | sensors |
| list of sensors that are mounted at the robot. (e.g. AxisOrientationSensor) | |
Member Function Documentation
| void addSensor | ( | Sensor * | s | ) | [inline] |
adds a sensor to the list of sensors
Member Data Documentation
camera config. Allows to change the image processing
relative pose of the camera
camera sensor (converts image to sensor data) (if NULL then DirectCameraSensor() is used)
list of sensors that are mounted at the robot. (e.g. AxisOrientationSensor)
| bool useCamera |
whether to use the camera
The documentation for this struct was generated from the following file:
