OsgHandle Class Reference
Data structure for accessing the OpenSceneGraph. More...
#include <osghandle.h>
Public Member Functions | |
| OsgHandle () | |
| ~OsgHandle () | |
| void | init () |
| initialization of the structure | |
| void | setup (int windowW, int windowH) |
| set up robotcameramanager (must be called after init but before usage of the structure) | |
| void | close () |
| deletes all internal variables | |
| OsgHandle | changeColor (const Color &color) const |
| returns a new osghandle with only the color changed | |
| OsgHandle | changeColor (double r, double g, double b, double a=1.0) const |
| returns a new osghandle with only the color changed | |
| OsgHandle | changeAlpha (double alpha) const |
| returns a new osghandle with only the alpha channel changed | |
| OsgHandle | changeColor (const std::string &name) const |
| returns a new osghandle with only the color changed | |
| OsgHandle | changeColorDef (const std::string &name, const Color &defcolor) const |
| like changeColor(string) but with a default color (defcolor) in case no color with the name exists | |
| Color | getColor (const std::string &name) const |
| returns the color that corresponds to the name (name,id, or alias) in the colorschema. | |
| OsgHandle | changeColorSet (int color_set) const |
| returns a new osghandle with a changed color (alias) set | |
| void | setColorSet (int color_set) |
| modifies the used color set. Only applies to new set colors. | |
| ColorSchema * | colorSchema () |
| returns the color schema. | |
| const ColorSchema * | colorSchema () const |
Public Attributes | |
| bool | drawBoundings |
| decides whether to draw bounding boxes | |
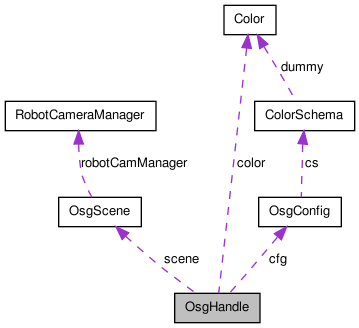
| Color | color |
| OsgConfig * | cfg |
| OsgScene * | scene |
| osg::Group * | parent |
Detailed Description
Data structure for accessing the OpenSceneGraph.
- Examples:
Constructor & Destructor Documentation
| OsgHandle | ( | ) |
| ~OsgHandle | ( | ) |
Member Function Documentation
| OsgHandle changeAlpha | ( | double | alpha | ) | const |
returns a new osghandle with only the alpha channel changed
| OsgHandle changeColor | ( | const std::string & | name | ) | const |
returns a new osghandle with only the color changed
- Parameters:
-
name name,id, or alias of a color in the colorschema The current color_set is used
| OsgHandle changeColor | ( | double | r, | |
| double | g, | |||
| double | b, | |||
| double | a = 1.0 | |||
| ) | const |
returns a new osghandle with only the color changed
returns a new osghandle with only the color changed
- Examples:
- template_sphererobot/main.cpp.
like changeColor(string) but with a default color (defcolor) in case no color with the name exists
| OsgHandle changeColorSet | ( | int | color_set | ) | const |
returns a new osghandle with a changed color (alias) set
| void close | ( | ) |
deletes all internal variables
| const ColorSchema * colorSchema | ( | ) | const |
| ColorSchema * colorSchema | ( | ) |
returns the color schema.
Use this to set/load colors and aliases Note, the color schema is shared among the osghandles
| Color getColor | ( | const std::string & | name | ) | const |
returns the color that corresponds to the name (name,id, or alias) in the colorschema.
The current color_set is used
| void init | ( | ) |
initialization of the structure
| void setColorSet | ( | int | color_set | ) |
modifies the used color set. Only applies to new set colors.
| void setup | ( | int | windowW, | |
| int | windowH | |||
| ) |
set up robotcameramanager (must be called after init but before usage of the structure)
Member Data Documentation
| bool drawBoundings |
decides whether to draw bounding boxes
| osg::Group* parent |
The documentation for this class was generated from the following files:
