GlobalData Class Reference
Data structure holding all essential global information. More...
#include <globaldata.h>
Inherits GlobalDataBase.
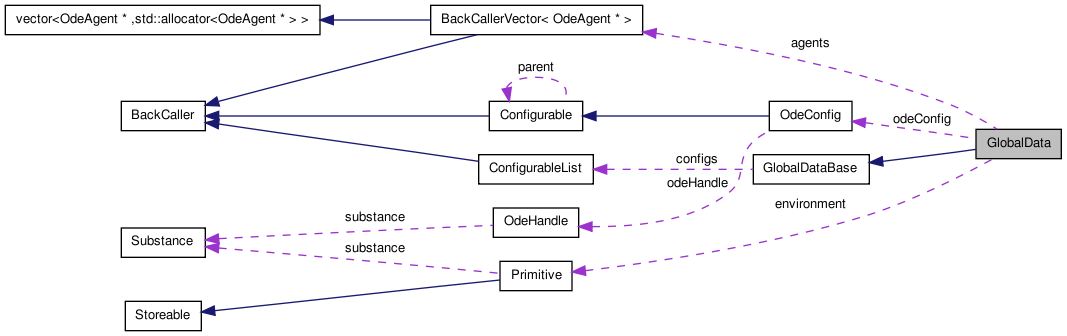
Collaboration diagram for GlobalData:
Public Member Functions | |
| GlobalData () | |
| virtual | ~GlobalData () |
| virtual AgentList & | getAgents () |
| returns the list of all agents | |
| virtual void | addTmpObject (TmpObject *i, double duration) |
| adds a temporary display item with given life duration in sec | |
| virtual void | initializeTmpObjects (const OdeHandle &odeHandle, const OsgHandle &osgHandle) |
| called by Simulation to initialize tmp objects | |
| virtual void | updateTmpObjects (const OsgHandle &osgHandle) |
| called by Simulation to update tmp objects | |
| virtual void | removeExpiredObjects (double time=-1) |
| called by Simulation to removes all expired sounds and temporary objects. | |
Public Attributes | |
| OdeConfig | odeConfig |
| ObstacleList | obstacles |
| OdeAgentList | agents |
| Primitive * | environment |
| SoundList | sounds |
| < this is used to be able to attach objects to the static environment | |
| PlotOptionList | plotoptions |
| plotoptions used for new agents | |
| std::list< Configurable * > | globalconfigurables |
| global configurables plotted by all agents | |
| double | time |
| long int | sim_step |
| time steps since start | |
Detailed Description
Data structure holding all essential global information.
- Examples:
Constructor & Destructor Documentation
| GlobalData | ( | ) | [inline] |
| virtual ~GlobalData | ( | ) | [inline, virtual] |
Member Function Documentation
| void addTmpObject | ( | TmpObject * | i, | |
| double | duration | |||
| ) | [virtual] |
adds a temporary display item with given life duration in sec
| AgentList & getAgents | ( | ) | [virtual] |
returns the list of all agents
Implements GlobalDataBase.
called by Simulation to initialize tmp objects
| void removeExpiredObjects | ( | double | time = -1 |
) | [virtual] |
called by Simulation to removes all expired sounds and temporary objects.
Optionally a time can be specified otherwise the internal time is used.
| void updateTmpObjects | ( | const OsgHandle & | osgHandle | ) | [virtual] |
called by Simulation to update tmp objects
Member Data Documentation
- Examples:
- template_sphererobot/main.cpp.
| std::list<Configurable*> globalconfigurables |
global configurables plotted by all agents
- Examples:
- template_sphererobot/main.cpp.
- Examples:
- template_sphererobot/main.cpp.
plotoptions used for new agents
| long int sim_step |
time steps since start
| double time |
The documentation for this class was generated from the following files:
