Nimm2 Class Reference
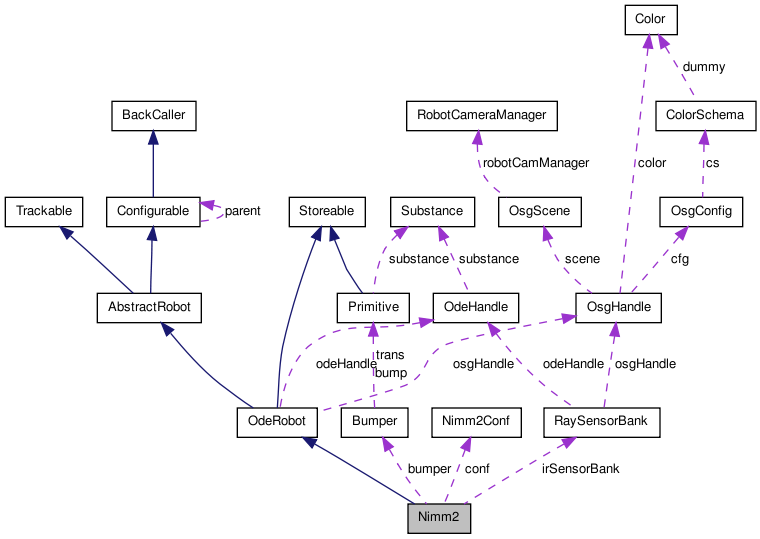
Robot that looks like a Nimm 2 Bonbon :-) 2 wheels and a cylinder like body.
More...
#include <nimm2.h>
Inherits lpzrobots::OdeRobot.
Inherited by TwoWheeled.
List of all members.
Detailed Description
Robot that looks like a Nimm 2 Bonbon :-) 2 wheels and a cylinder like body.
wheel order: left, right IR order: front left, front right, right, right rear, rear right, rear left, left rear, left
Constructor & Destructor Documentation
Member Function Documentation
| void create |
( |
const osg::Matrix & |
pose |
) |
[protected, virtual] |
creates vehicle at desired pose
creates vehicle at desired position
- Parameters:
-
| pose | 4x4 pose matrix |
| pos | struct Position with desired position |
Reimplemented in TwoWheeled.
| void destroy |
( |
|
) |
[protected, virtual] |
destroys vehicle and space
Reimplemented in TwoWheeled.
| void doInternalStuff |
( |
GlobalData & |
globalData |
) |
[virtual] |
this function is called in each timestep.
It should perform robot-internal checks, like space-internal collision detection, sensor resets/update etc.
- Parameters:
-
| globalData | structure that contains global data from the simulation environment |
Reimplemented from OdeRobot.
| virtual double& getContactPoints |
( |
|
) |
[inline, virtual] |
| static Nimm2Conf getDefaultConf |
( |
|
) |
[inline, static] |
| virtual int getMotorNumber |
( |
|
) |
[inline, virtual] |
| int getSegmentsPosition |
( |
std::vector< Position > & |
poslist |
) |
[virtual] |
returns a vector with the positions of all segments of the robot
- Parameters:
-
| poslist | vector of positions (of all robot segments) |
- Returns:
- length of the list
| virtual int getSensorNumber |
( |
|
) |
[inline, virtual] |
| int getSensors |
( |
sensor * |
sensors, |
|
|
int |
sensornumber | |
|
) |
| | [virtual] |
returns actual sensorvalues
- Parameters:
-
| sensors | sensors scaled to [-1,1] |
| sensornumber | length of the sensor array |
- Returns:
- number of actually written sensors
- Parameters:
-
| sensors | sensors scaled to [-1,1] (more or less) |
| sensornumber | length of the sensor array |
- Returns:
- number of actually written sensors
Implements AbstractRobot.
Reimplemented in TwoWheeled.
| virtual double& getSumForce |
( |
|
) |
[inline, virtual] |
| static void mycallback |
( |
void * |
data, |
|
|
dGeomID |
o1, |
|
|
dGeomID |
o2 | |
|
) |
| | [static, protected] |
sets the pose of the vehicle
- Parameters:
-
| pose | desired 4x4 pose matrix |
Implements OdeRobot.
| void setMotors |
( |
const motor * |
motors, |
|
|
int |
motornumber | |
|
) |
| | [virtual] |
sets actual motorcommands
- Parameters:
-
| motors | motors scaled to [-1,1] |
| motornumber | length of the motor array |
Implements AbstractRobot.
| void update |
( |
|
) |
[virtual] |
updates the OSG nodes of the vehicle
updates the osg notes and sensorbank
Implements OdeRobot.
Reimplemented in TwoWheeled.
Member Data Documentation
The documentation for this class was generated from the following files: