Camera Class Reference
#include <camera.h>
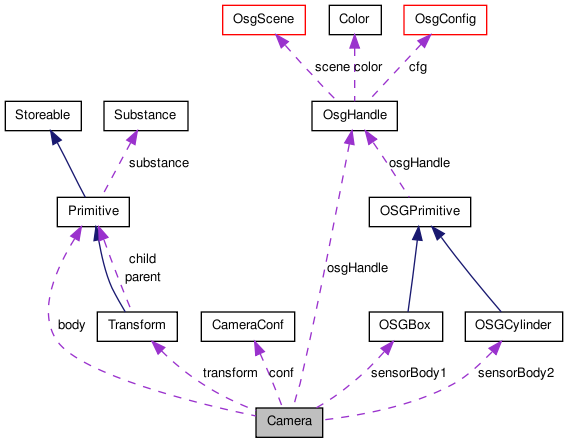
Collaboration diagram for Camera:
Classes | |
| struct | CameraImage |
| structure to store the image data and information for display More... | |
| struct | PostDrawCallback |
Public Types | |
| typedef std::vector< CameraImage > | CameraImages |
Public Member Functions | |
| Camera (const CameraConf &conf=getDefaultConf()) | |
| Creates a camera. | |
| virtual | ~Camera () |
| virtual void | init (const OdeHandle &odeHandle, const OsgHandle &osgHandle, Primitive *body, const osg::Matrix &pose) |
| initializes the camera. | |
| virtual void | setPose (const osg::Matrix &pose) |
| changes the relative pose of the camera | |
| virtual osg::Matrix | getPose () |
| relative pose of the camera | |
| virtual const CameraImages & | getImages () const |
| all images (raw and processed) | |
| virtual const osg::Image * | getImage () const |
| last image of processing stack | |
| virtual osg::Camera * | getRRTCam () |
| virtual void | update () |
| bool | isInitialized () |
Static Public Member Functions | |
| static CameraConf | getDefaultConf () |
Detailed Description
A Robot Camera.
Implements a simulated camera with full OpenGL rendering.
Member Typedef Documentation
| typedef std::vector<CameraImage > CameraImages |
Constructor & Destructor Documentation
| Camera | ( | const CameraConf & | conf = getDefaultConf() |
) |
Creates a camera.
Note that the order in which the image processors are positioned in conf.imageProcessors matters. The resulting CameraImages are stored in a list (see getImages) and usually the processors use the last image in this list (result of last processing).
| ~Camera | ( | ) | [virtual] |
Member Function Documentation
| static CameraConf getDefaultConf | ( | ) | [inline, static] |
| virtual const osg::Image* getImage | ( | ) | const [inline, virtual] |
last image of processing stack
| virtual const CameraImages& getImages | ( | ) | const [inline, virtual] |
all images (raw and processed)
| osg::Matrix getPose | ( | ) | [virtual] |
relative pose of the camera
returns the relative pose of the camera
| virtual osg::Camera* getRRTCam | ( | ) | [inline, virtual] |
| void init | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| Primitive * | body, | |||
| const osg::Matrix & | pose | |||
| ) | [virtual] |
initializes the camera.
The OSG camera is created and the raw image and the imageprocessor is initialized.
| bool isInitialized | ( | ) | [inline] |
| void setPose | ( | const osg::Matrix & | pose | ) | [virtual] |
changes the relative pose of the camera
| void update | ( | ) | [virtual] |
The documentation for this class was generated from the following files:
