#include <schlangeservo2.h>
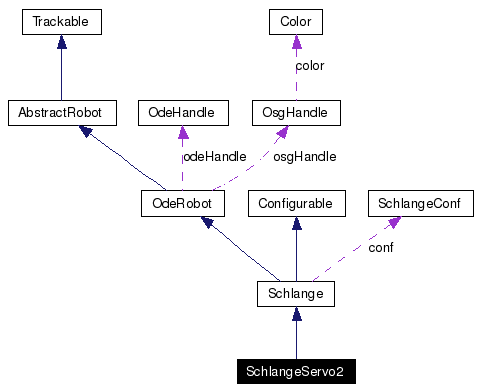
Inheritance diagram for SchlangeServo2:
It consists of a number of equal elements, each linked by a joint powered by 2 servos
Definition at line 51 of file schlangeservo2.h.
Public Member Functions | |
| SchlangeServo2 (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const SchlangeConf &conf, const char *name) | |
| virtual | ~SchlangeServo2 () |
| virtual void | setMotors (const motor *motors, int motornumber) |
| Reads the actual motor commands from an array, an sets all motors (forces) of the snake to this values. | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual bool | setParam (const paramkey &key, paramval val) |
|
||||||||||||||||||||
|
Definition at line 36 of file schlangeservo2.cpp. |
|
|
Definition at line 46 of file schlangeservo2.cpp. |
|
|
returns number of motors
Implements Schlange. Definition at line 86 of file schlangeservo2.h. |
|
|
returns number of sensors
Implements Schlange. Definition at line 82 of file schlangeservo2.h. |
|
||||||||||||
|
Writes the sensor values to an array in the memory.
Implements Schlange. Definition at line 72 of file schlangeservo2.cpp. |
|
||||||||||||
|
Reads the actual motor commands from an array, an sets all motors (forces) of the snake to this values. It is an linear allocation.
Implements Schlange. Definition at line 55 of file schlangeservo2.cpp. |
|
||||||||||||
|
Reimplemented from Schlange. Definition at line 123 of file schlangeservo2.cpp. |
 1.4.5
1.4.5