|
Public Member Functions |
| | Agent (const PlotOption &plotOption) |
| | constructor
|
| | Agent (const list< PlotOption > &plotOptions) |
| virtual | ~Agent () |
| | destructor
|
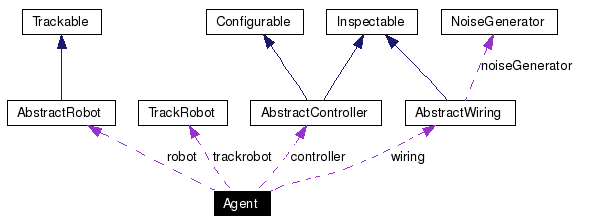
| virtual bool | init (AbstractController *controller, AbstractRobot *robot, AbstractWiring *wiring) |
| | initializes the object with the given controller, robot and wiring and initializes pipe to guilogger
|
| virtual void | step (double noise) |
| | Performs an step of the agent, including sensor reading, pushing sensor values through wiring, controller step, pushing controller outputs (= motorcommands) back through wiring and sent resulting motorcommands to robot.
|
| virtual AbstractController * | getController () |
| | Returns a pointer to the controller.
|
| virtual AbstractRobot * | getRobot () |
| | Returns a pointer to the robot.
|
| virtual AbstractWiring * | getWiring () |
| | Returns a pointer to the wiring.
|
| virtual void | setTrackOptions (const TrackRobot &trackrobot) |
| | sets the trackoptions which enable tracking of a robot
|
Protected Member Functions |
| virtual void | plot (const sensor *rx, int rsensornumber, const sensor *cx, int csensornumber, const motor *y, int motornumber) |
| | Plots controller sensor- and motorvalues and internal controller parameters.
|
| void | internInit () |
Protected Attributes |
| AbstractController * | controller |
| AbstractRobot * | robot |
| AbstractWiring * | wiring |
| int | rsensornumber |
| | number of sensors of robot
|
| int | rmotornumber |
| | number of motors of robot
|
| int | csensornumber |
| | number of sensors of comntroller
|
| int | cmotornumber |
| | number of motors of comntroller
|
| sensor * | rsensors |
| motor * | rmotors |
| sensor * | csensors |
| motor * | cmotors |
| TrackRobot | trackrobot |
 1.4.5
1.4.5