#include <abstractwiring.h>
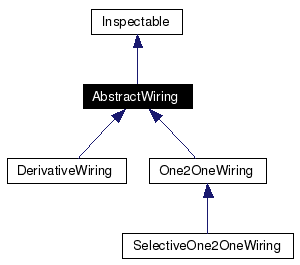
Inheritance diagram for AbstractWiring:
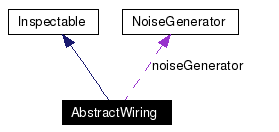
Implements wiring of robot sensors to inputs of the controller and controller outputs to robot motors.
Definition at line 63 of file abstractwiring.h.
Public Member Functions | |
| AbstractWiring (NoiseGenerator *noise) | |
| constructor | |
| virtual | ~AbstractWiring () |
| destructor | |
| virtual bool | init (int robotsensornumber, int robotmotornumber)=0 |
| Initializes the number of sensors and motors from robot (to be precise the internal parameters rsensornumber and rmotornumber!), calculates the number of sensors and motors on controller side. | |
| virtual bool | wireSensors (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise)=0 |
| Realizes wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotors (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber)=0 |
| Realizes wiring from controller motor outputs to robot motors. | |
| virtual int | getRobotSensornumber () |
| Returns the number of sensors on robot side. | |
| virtual int | getRobotMotornumber () |
| Returns the number of motors on robot side. | |
| virtual int | getControllerSensornumber () |
| Returns the number of sensors on controller side. | |
| virtual int | getControllerMotornumber () |
| Returns the number of motors on controller side. | |
| virtual list< iparamkey > | getInternalParamNames () const |
| Returns the list of the names of all internal parameters. | |
| virtual list< iparamval > | getInternalParams () const |
| Returns a list of the values of all internal parameters (in the order given by getInternalParamNames()). | |
Protected Attributes | |
| int | rsensornumber |
| number of sensors at robot side | |
| int | rmotornumber |
| number of motors at robot side | |
| int | csensornumber |
| number of sensors at controller side | |
| int | cmotornumber |
| number of motors at controller side | |
| NoiseGenerator * | noiseGenerator |
|
|
constructor
Definition at line 68 of file abstractwiring.h. |
|
|
destructor
Definition at line 78 of file abstractwiring.h. |
|
|
Returns the number of motors on controller side.
Definition at line 132 of file abstractwiring.h. |
|
|
Returns the number of sensors on controller side.
Definition at line 128 of file abstractwiring.h. |
|
|
Returns the list of the names of all internal parameters.
Implements Inspectable. Reimplemented in One2OneWiring. Definition at line 136 of file abstractwiring.h. |
|
|
Returns a list of the values of all internal parameters (in the order given by getInternalParamNames()).
Implements Inspectable. Reimplemented in One2OneWiring. Definition at line 141 of file abstractwiring.h. |
|
|
Returns the number of motors on robot side.
Definition at line 124 of file abstractwiring.h. |
|
|
Returns the number of sensors on robot side.
Definition at line 120 of file abstractwiring.h. |
|
||||||||||||
|
Initializes the number of sensors and motors from robot (to be precise the internal parameters rsensornumber and rmotornumber!), calculates the number of sensors and motors on controller side. Must be overloaded to calculate and provide the appropriate numbers controllersensornumber (csensornumber), controllermotornumber (cmotornumber), robotsensornumber (rsensornumber) and robotmotornumber (rmotornumber),
Implemented in DerivativeWiring, One2OneWiring, and SelectiveOne2OneWiring. |
|
||||||||||||||||||||
|
Realizes wiring from controller motor outputs to robot motors. Must be overloaded in order to implement the appropriate mapping.
Implemented in DerivativeWiring, and One2OneWiring. |
|
||||||||||||||||||||||||
|
Realizes wiring from robot sensors to controller sensors. Must be overloaded in order to implement the appropriate mapping.
Implemented in DerivativeWiring, One2OneWiring, and SelectiveOne2OneWiring. |
|
|
number of motors at controller side
Definition at line 155 of file abstractwiring.h. |
|
|
number of sensors at controller side
Definition at line 152 of file abstractwiring.h. |
|
|
Definition at line 157 of file abstractwiring.h. |
|
|
number of motors at robot side
Definition at line 149 of file abstractwiring.h. |
|
|
number of sensors at robot side
Definition at line 141 of file abstractwiring.h. |
 1.4.5
1.4.5