#include <caterpillar.h>
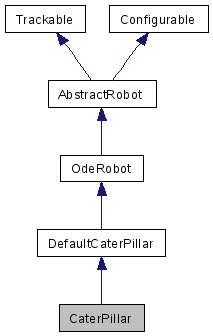
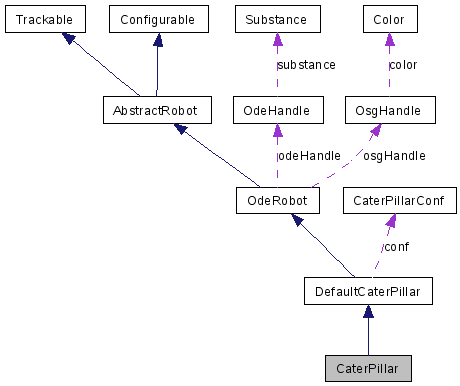
Inherits DefaultCaterPillar.
Inheritance diagram for CaterPillar:
Public Member Functions | |
| CaterPillar (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const CaterPillarConf &conf, const std::string &name) | |
| virtual | ~CaterPillar () |
| virtual void | setMotors (const motor *motors, int motornumber) |
| Reads the actual motor commands from an array, and sets all motors (forces) of the snake to this values. | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual bool | setParam (const paramkey &key, paramval val) |
It consists of a number of equal elements, each linked by a joint powered by 2 servos
| CaterPillar | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const CaterPillarConf & | conf, | |||
| const std::string & | name | |||
| ) |
| ~CaterPillar | ( | ) | [virtual] |
| virtual int getMotorNumber | ( | ) | [inline, virtual] |
| virtual int getSensorNumber | ( | ) | [inline, virtual] |
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
Writes the sensor values to an array in the memory.
| sensors | pointer to the array | |
| sensornumber | length of the sensor array |
Implements DefaultCaterPillar.
| void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [virtual] |
Reads the actual motor commands from an array, and sets all motors (forces) of the snake to this values.
It is an linear allocation.
| motors | pointer to the array, motor values are scaled to [-1,1] | |
| motornumber | length of the motor array |
Implements DefaultCaterPillar.
Reimplemented from DefaultCaterPillar.
 1.4.7
1.4.7