#include <abstractrobot.h>
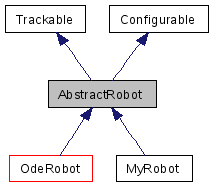
Inherits Trackable, and Configurable.
Inherited by OdeRobot, and MyRobot.
Inheritance diagram for AbstractRobot:
Public Types | |
| typedef double | sensor |
| typedef double | motor |
Public Member Functions | |
| AbstractRobot (const std::string &name="abstractRobot", const std::string &revision="$ID$") | |
| Constructor. | |
| virtual | ~AbstractRobot () |
| virtual int | getSensors (sensor *sensors, int sensornumber)=0 |
| returns actual sensorvalues | |
| virtual void | setMotors (const motor *motors, int motornumber)=0 |
| sets actual motorcommands | |
| virtual int | getSensorNumber ()=0 |
| returns number of sensors | |
| virtual int | getMotorNumber ()=0 |
| returns number of motors | |
| typedef double motor |
| typedef double sensor |
| AbstractRobot | ( | const std::string & | name = "abstractRobot", |
|
| const std::string & | revision = "$ID$" | |||
| ) | [inline] |
Constructor.
| name | name of the robot | |
| revision | revision number of the file (Hint: use CVS variable$ID$ |
| virtual ~AbstractRobot | ( | ) | [inline, virtual] |
| virtual int getMotorNumber | ( | ) | [pure virtual] |
returns number of motors
Implemented in MyRobot, AddSensors2RobotAdapter, Arm, Arm2Segm, AtomComponent, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, Discus, ForcedSphere, Formel1, Hand, HurlingSnake, MuscledArm, Nimm2, Nimm4, ReplayRobot, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, VierBeiner, and Wheelie.
| virtual int getSensorNumber | ( | ) | [pure virtual] |
returns number of sensors
Implemented in MyRobot, AddSensors2RobotAdapter, Arm, Arm2Segm, AtomComponent, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, Discus, ForcedSphere, Formel1, FourWheeled, Hand, HurlingSnake, MuscledArm, Nimm2, Nimm4, ReplayRobot, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, VierBeiner, and Wheelie.
| virtual int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [pure virtual] |
returns actual sensorvalues
| sensors | sensors scaled to [-1,1] | |
| sensornumber | length of the sensor array |
Implemented in MyRobot, AddSensors2RobotAdapter, Arm, Arm2Segm, AtomComponent, Barrel2Masses, Barrel2Masses2nd, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, Discus, ForcedSphere, Formel1, FourWheeled, Hand, HurlingSnake, MuscledArm, Nimm2, Nimm4, ReplayRobot, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, VierBeiner, and Wheelie.
| virtual void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [pure virtual] |
sets actual motorcommands
| motors | motors scaled to [-1,1] | |
| motornumber | length of the motor array |
Implemented in MyRobot, AddSensors2RobotAdapter, Arm, Arm2Segm, AtomComponent, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, Discus, ForcedSphere, Formel1, Hand, HurlingSnake, MuscledArm, Nimm2, Nimm4, ReplayRobot, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, VierBeiner, and Wheelie.
 1.4.7
1.4.7