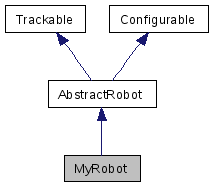
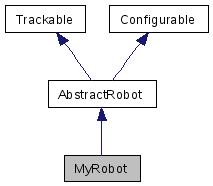
Inheritance diagram for MyRobot:
Public Member Functions | |
| MyRobot () | |
| ~MyRobot () | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| returns actual sensorvalues | |
| virtual void | setMotors (const motor *motors, int motornumber) |
| sets actual motorcommands | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual Position | getPosition () const |
| returns position of the object | |
| virtual Position | getSpeed () const |
| returns linear speed vector of the object | |
| virtual Position | getAngularSpeed () const |
| returns linear speed vector of the object | |
| virtual matrix::Matrix | getOrientation () const |
| returns the orientation of the object | |
| virtual paramval | getParam (const paramkey &key) const |
| virtual bool | setParam (const paramkey &key, paramval val) |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
| MyRobot | ( | ) | [inline] |
| ~MyRobot | ( | ) | [inline] |
| virtual Position getAngularSpeed | ( | ) | const [inline, virtual] |
| virtual int getMotorNumber | ( | ) | [inline, virtual] |
| virtual matrix::Matrix getOrientation | ( | ) | const [inline, virtual] |
| virtual paramlist getParamList | ( | ) | const [inline, virtual] |
The list of all parameters with there value as allocated lists.
Note that these are only parameters that are managed manually (with setParam, getParam)
Reimplemented from Configurable.
| virtual Position getPosition | ( | ) | const [inline, virtual] |
| virtual int getSensorNumber | ( | ) | [inline, virtual] |
| virtual int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [inline, virtual] |
returns actual sensorvalues
| sensors | sensors scaled to [-1,1] | |
| sensornumber | length of the sensor array |
Implements AbstractRobot.
| virtual Position getSpeed | ( | ) | const [inline, virtual] |
| virtual void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [inline, virtual] |
sets actual motorcommands
| motors | motors scaled to [-1,1] | |
| motornumber | length of the motor array |
Implements AbstractRobot.
 1.4.7
1.4.7