#include <barrel2masses.h>
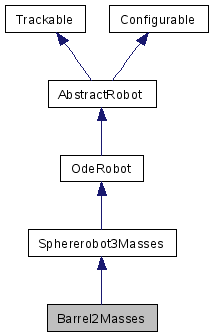
Inherits Sphererobot3Masses.
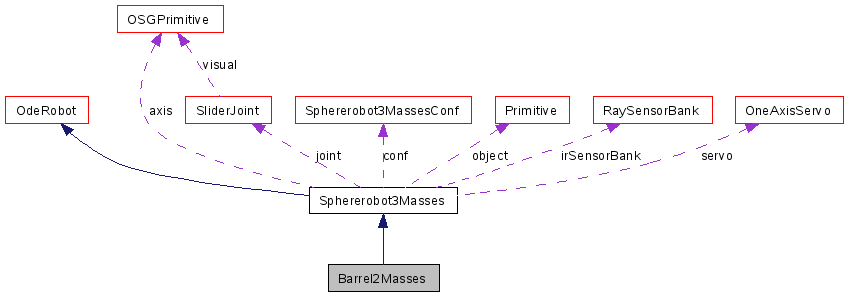
Inheritance diagram for Barrel2Masses:
Public Member Functions | |
| Barrel2Masses (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const Sphererobot3MassesConf &conf, const std::string &name, double transparency=0.5) | |
| constructor | |
| virtual | ~Barrel2Masses () |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Writes the sensor values to an array in the memory. | |
Static Public Member Functions | |
| static Sphererobot3MassesConf | getDefaultConf () |
| default configuration. | |
Protected Member Functions | |
| virtual void | create (const osg::Matrix &pose) |
| The cylinder (main body) lies on the ground, that it is rotating about the z-axis. | |
It is the small brother of the Sphererobot3Masses. This robot was inspired by Julius Popp (http://sphericalrobots.com)
| Barrel2Masses | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const Sphererobot3MassesConf & | conf, | |||
| const std::string & | name, | |||
| double | transparency = 0.5 | |||
| ) |
constructor
It is configured with the configuration object of Sphererobot3Masses. Just two of the 3 axis are used. The worldZaxissensor and irAxis3 has no meaning here.
| ~Barrel2Masses | ( | ) | [virtual] |
| void create | ( | const osg::Matrix & | pose | ) | [protected, virtual] |
The cylinder (main body) lies on the ground, that it is rotating about the z-axis.
Reimplemented from Sphererobot3Masses.
| static Sphererobot3MassesConf getDefaultConf | ( | ) | [inline, static] |
default configuration.
It has no sensors. Use addSensor(new AxisOrientationSensor(ZProjectionXY) for example.
Reimplemented from Sphererobot3Masses.
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
Writes the sensor values to an array in the memory.
| sensor* | pointer to the array | |
| sensornumber | length of the sensor array |
Reimplemented from Sphererobot3Masses.
 1.4.7
1.4.7