#include <sliderwheelie.h>
Inherits OdeRobot.
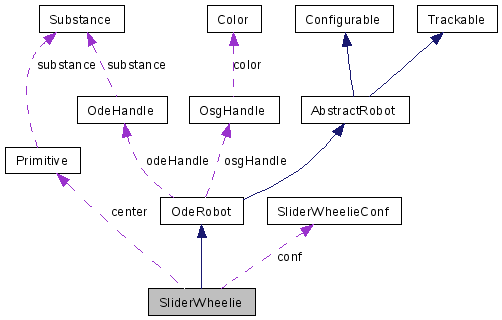
Inheritance diagram for SliderWheelie:
Public Member Functions | |
| SliderWheelie (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const SliderWheelieConf &conf, const std::string &name, const std::string &revision="") | |
| virtual | ~SliderWheelie () |
| virtual void | place (const osg::Matrix &pose) |
| sets the pose of the vehicle | |
| virtual void | update () |
| update the OSG notes here | |
| void | doInternalStuff (GlobalData &global) |
| this function is called in each timestep after control. | |
| bool | collisionCallback (void *data, dGeomID o1, dGeomID o2) |
| virtual void | setMotors (const motor *motors, int motornumber) |
| sets actual motorcommands | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| returns actual sensorvalues | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual Primitive * | getMainPrimitive () const |
| return the primitive of the robot that is used for tracking and camera following | |
| virtual paramlist | getParamList () const |
| The list of all parameters with there value as allocated lists. | |
| virtual paramval | getParam (const paramkey &key) const |
| virtual bool | setParam (const paramkey &key, paramval val) |
Static Public Member Functions | |
| static SliderWheelieConf | getDefaultConf () |
It consists of a number of equal elements, each linked by a joint powered by 1 servo
| SliderWheelie | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const SliderWheelieConf & | conf, | |||
| const std::string & | name, | |||
| const std::string & | revision = "" | |||
| ) |
| ~SliderWheelie | ( | ) | [virtual] |
| bool collisionCallback | ( | void * | data, | |
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [virtual] |
Reimplemented from OdeRobot.
| void doInternalStuff | ( | GlobalData & | global | ) | [virtual] |
this function is called in each timestep after control.
It should perform robot-internal checks and actions, like acting and sensing of internal motors/sensors etc.
| globalData | structure that contains global data from the simulation environment |
Implements OdeRobot.
| static SliderWheelieConf getDefaultConf | ( | ) | [inline, static] |
| virtual Primitive* getMainPrimitive | ( | ) | const [inline, virtual] |
return the primitive of the robot that is used for tracking and camera following
Implements OdeRobot.
| virtual int getMotorNumber | ( | ) | [inline, virtual] |
| Configurable::paramval getParam | ( | const paramkey & | key | ) | const [virtual] |
| Configurable::paramlist getParamList | ( | ) | const [virtual] |
The list of all parameters with there value as allocated lists.
Reimplemented from Configurable.
| virtual int getSensorNumber | ( | ) | [inline, virtual] |
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
returns actual sensorvalues
| sensors | sensors scaled to [-1,1] | |
| sensornumber | length of the sensor array |
Implements AbstractRobot.
| void place | ( | const osg::Matrix & | pose | ) | [virtual] |
| void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [virtual] |
sets actual motorcommands
| motors | motors scaled to [-1,1] | |
| motornumber | length of the motor array |
Implements AbstractRobot.
| void update | ( | ) | [virtual] |
 1.4.7
1.4.7