Simulation Class Reference
#include <simulation.h>
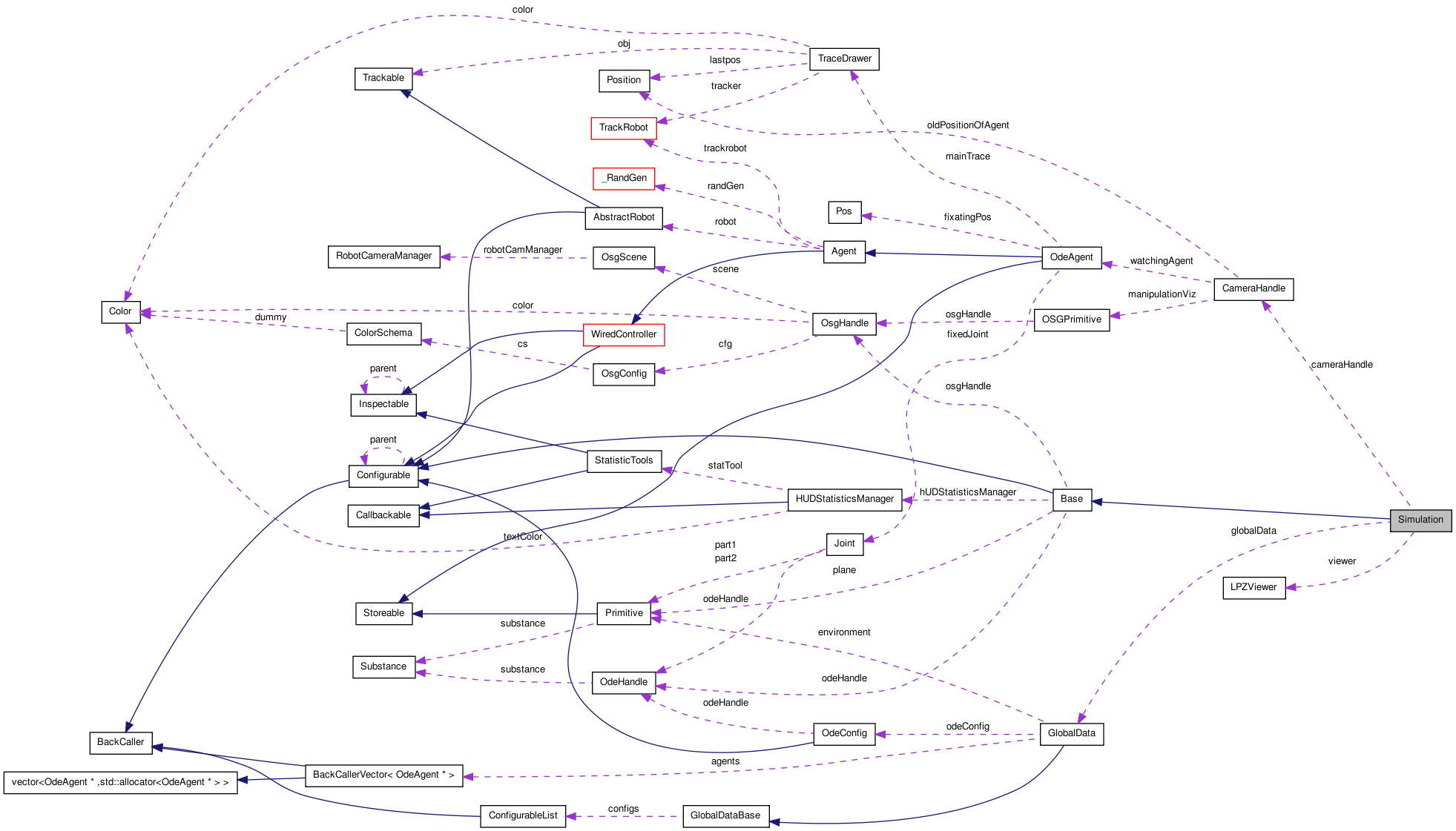
Inherits lpzrobots::Base.
Inherited by TaskedSimulation, and ThisSim.
Public Types | |
| enum | SimulationState { none, initialised, running, closed } |
| enum | CameraMode { Static = 0, Follow, TV, Race } |
Public Member Functions | |
| Simulation () | |
| virtual | ~Simulation () |
| bool | run (int argc, char **argv) |
| starts the Simulation. | |
| virtual void | start (const OdeHandle &, const OsgHandle &, GlobalData &globalData)=0 |
| start() is called at the first start of the cycles and should create all the object (obstacles, agents...). | |
| virtual bool | restart (const OdeHandle &, const OsgHandle &, GlobalData &globalData) |
| restart() is called at the second and all following starts of the cylce The end of a cycle is determined by (simulation_time_reached==true) | |
| virtual void | end (GlobalData &globalData) |
| end() is called at the end and should tidy up | |
| virtual bool | config (GlobalData &globalData) |
| config() is called when the user presses Ctrl-C | |
| virtual bool | command (const OdeHandle &, const OsgHandle &, GlobalData &globalData, int key, bool down) |
| is called if a key was pressed. | |
| virtual void | bindingDescription (osg::ApplicationUsage &au) const |
| this can be used to describe the key bindings used by command() | |
| virtual void | usage () const |
| this can be used to print additional usage information (cmd-line options) | |
| virtual bool | collCallback (const OdeHandle &, void *data, dGeomID o1, dGeomID o2) |
| collCallback() can be used to overload the standart collision handling. | |
| virtual void | addCallback (GlobalData &globalData, bool draw, bool pause, bool control) |
| optional additional callback function which is called every simulation step. | |
| virtual void | addPaletteFile (const std::string &filename, bool verbose=false) |
| adds a palette file to be loaded at initialization time Call this before run()! | |
| virtual void | addColorAliasFile (const std::string &filename, bool verbose=false) |
| adds a color alias file to be loaded at initialization time Call this before run()! | |
| virtual void | odeStep () |
| virtual void | osgStep () |
Protected Member Functions | |
| virtual bool | handle (const osgGA::GUIEventAdapter &ea, osgGA::GUIActionAdapter &) |
| virtual void | getUsage (osg::ApplicationUsage &au) const |
| virtual void | accept (osgGA::GUIEventHandlerVisitor &v) |
| virtual bool | init (int argc, char **argv) |
| virtual void | updateGraphics () |
| update the graphics objects | |
| void | setCameraHomePos (const osg::Vec3 &eye, const osg::Vec3 &view) |
| define the home position and view orientation of the camera. | |
| void | setCameraMode (CameraMode mode) |
| Sets the mode of the camera, the numbers are the same like the keys. | |
| void | setWatchedAgent (OdeAgent *agent) |
| Sets the agent to be watched with the camera. | |
| bool | control_c_pressed () |
| __attribute__ ((deprecated)) void showParams(const ConfigList &configs) | |
| shows all parameters of all given configurable objects | |
| virtual bool | processCmdLine (int argc, char **argv) |
| returns false if the program is to exit | |
| void | resetSyncTimer () |
| long | timeOfDayinMS () |
Static Protected Member Functions | |
| static void | nearCallback_TopLevel (void *data, dGeomID o1, dGeomID o2) |
| static void | nearCallback (void *data, dGeomID o1, dGeomID o2) |
Protected Attributes | |
| std::list< PlotOption > & | plotoptions |
| GlobalData | globalData |
| osg::ref_ptr< VideoStream > | videostream |
| int | nextLeakAnnounce |
| int | leakAnnCounter |
| long | realtimeoffset |
| long | simtimeoffset |
| double | truerealtimefactor |
| bool | justresettimes |
| paramint | windowWidth |
| paramint | windowHeight |
| paramint | defaultFPS |
| bool | pause |
| bool | simulation_time_reached |
| long int | simulation_time |
| bool | noGraphics |
| bool | useKeyHandler |
| int | guiloggerinterval |
| int | filelogginginterval |
| int | matrixvizinterval |
| char | odeRobotsCfg [256] |
| int | currentCycle |
| < filename of config file | |
| CameraHandle | cameraHandle |
| parambool | useOdeThread |
| parambool | useOsgThread |
| parambool | useQMPThreads |
| parambool | inTaskedMode |
| std::string | windowName |
| SimulationState | state |
| osg::ArgumentParser * | arguments |
| LPZViewer * | viewer |
| osgGA::KeySwitchMatrixManipulator * | keyswitchManipulator |
| char ** | orig_argv |
| std::list< std::string > | paletteFiles |
| std::list< std::string > | colorAliasFiles |
| bool | verboseColorLoading |
| bool | startConfigurator |
| pthread_t | odeThread |
| pthread_t | osgThread |
| bool | odeThreadCreated |
| bool | osgThreadCreated |
Static Protected Attributes | |
| static int | ctrl_C = 0 |
Detailed Description
- Examples:
Member Enumeration Documentation
| enum CameraMode |
| enum SimulationState |
Constructor & Destructor Documentation
| Simulation | ( | ) |
| ~Simulation | ( | ) | [virtual] |
Member Function Documentation
| __attribute__ | ( | (deprecated) | ) | const [inline, protected] |
shows all parameters of all given configurable objects
- Deprecated:
- this is handled by simulation itself, do not call this function anymore
| void accept | ( | osgGA::GUIEventHandlerVisitor & | v | ) | [protected, virtual] |
| virtual void addCallback | ( | GlobalData & | globalData, | |
| bool | draw, | |||
| bool | pause, | |||
| bool | control | |||
| ) | [inline, virtual] |
optional additional callback function which is called every simulation step.
Called between physical simulation step and drawing.
- Parameters:
-
draw indicates that objects are drawn in this timestep pause always false (only called of simulation is running) control indicates that robots have been controlled this timestep
Reimplemented in ThisSim.
| void addColorAliasFile | ( | const std::string & | filename, | |
| bool | verbose = false | |||
| ) | [virtual] |
adds a color alias file to be loaded at initialization time Call this before run()!
| void addPaletteFile | ( | const std::string & | filename, | |
| bool | verbose = false | |||
| ) | [virtual] |
adds a palette file to be loaded at initialization time Call this before run()!
| virtual void bindingDescription | ( | osg::ApplicationUsage & | au | ) | const [inline, virtual] |
| virtual bool collCallback | ( | const OdeHandle & | , | |
| void * | data, | |||
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [inline, virtual] |
collCallback() can be used to overload the standart collision handling.
However it is called after the robots collision handling.
- Returns:
- true if collision is treated, false otherwise
| virtual bool command | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData, | |||
| int | key, | |||
| bool | down | |||
| ) | [inline, virtual] |
is called if a key was pressed.
For keycodes see: osgGA::GUIEventAdapter
- Returns:
- true if the key was handled
Reimplemented in ThisSim.
| bool config | ( | GlobalData & | globalData | ) | [virtual] |
config() is called when the user presses Ctrl-C
- Returns:
- false to exit program, true otherwise
| bool control_c_pressed | ( | ) | [protected] |
| void end | ( | GlobalData & | globalData | ) | [virtual] |
end() is called at the end and should tidy up
| void getUsage | ( | osg::ApplicationUsage & | au | ) | const [protected, virtual] |
| bool handle | ( | const osgGA::GUIEventAdapter & | ea, | |
| osgGA::GUIActionAdapter & | ||||
| ) | [protected, virtual] |
| bool init | ( | int | argc, | |
| char ** | argv | |||
| ) | [protected, virtual] |
| void nearCallback | ( | void * | data, | |
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [static, protected] |
use the new method with substances
| void nearCallback_TopLevel | ( | void * | data, | |
| dGeomID | o1, | |||
| dGeomID | o2 | |||
| ) | [static, protected] |
| void odeStep | ( | ) | [virtual] |
| void osgStep | ( | ) | [virtual] |
| bool processCmdLine | ( | int | argc, | |
| char ** | argv | |||
| ) | [protected, virtual] |
returns false if the program is to exit
| void resetSyncTimer | ( | ) | [protected] |
| bool restart | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData | |||
| ) | [virtual] |
restart() is called at the second and all following starts of the cylce The end of a cycle is determined by (simulation_time_reached==true)
restart() is called at the second and all following starts of the cylces
- Parameters:
-
the odeHandle the osgHandle globalData
- Returns:
- if the simulation should be restarted; this is false by default
| bool run | ( | int | argc, | |
| char ** | argv | |||
| ) |
starts the Simulation.
Do not overload it. This function returns of the simulation is terminated.
- Returns:
- : true if closed regulary, false on error
- Examples:
- template_sphererobot/main.cpp.
define the home position and view orientation of the camera.
view.x is the heading angle in degree. view.y is the tilt angle in degree (nick), view.z is ignored
- Examples:
- template_sphererobot/main.cpp.
| void setCameraMode | ( | CameraMode | mode | ) | [protected] |
Sets the mode of the camera, the numbers are the same like the keys.
- Parameters:
-
mode see CameraMode
| void setWatchedAgent | ( | OdeAgent * | agent | ) | [protected] |
Sets the agent to be watched with the camera.
- Parameters:
-
agent to set
| virtual void start | ( | const OdeHandle & | , | |
| const OsgHandle & | , | |||
| GlobalData & | globalData | |||
| ) | [pure virtual] |
| long timeOfDayinMS | ( | ) | [protected] |
| void updateGraphics | ( | ) | [protected, virtual] |
update the graphics objects
| virtual void usage | ( | ) | const [inline, virtual] |
this can be used to print additional usage information (cmd-line options)
Member Data Documentation
osg::ArgumentParser* arguments [protected] |
CameraHandle cameraHandle [protected] |
std::list<std::string> colorAliasFiles [protected] |
int ctrl_C = 0 [static, protected] |
int currentCycle [protected] |
< filename of config file
the current cycle; the simulation restarts if restart() returns true
paramint defaultFPS [protected] |
int filelogginginterval [protected] |
GlobalData globalData [protected] |
- Examples:
- template_sphererobot/main.cpp.
int guiloggerinterval [protected] |
parambool inTaskedMode [protected] |
bool justresettimes [protected] |
osgGA::KeySwitchMatrixManipulator* keyswitchManipulator [protected] |
int leakAnnCounter [protected] |
int matrixvizinterval [protected] |
int nextLeakAnnounce [protected] |
bool noGraphics [protected] |
char odeRobotsCfg[256] [protected] |
pthread_t odeThread [protected] |
bool odeThreadCreated [protected] |
char** orig_argv [protected] |
pthread_t osgThread [protected] |
bool osgThreadCreated [protected] |
std::list<std::string> paletteFiles [protected] |
bool pause [protected] |
std::list<PlotOption>& plotoptions [protected] |
long realtimeoffset [protected] |
long simtimeoffset [protected] |
long int simulation_time [protected] |
bool simulation_time_reached [protected] |
bool startConfigurator [protected] |
SimulationState state [protected] |
double truerealtimefactor [protected] |
bool useKeyHandler [protected] |
parambool useOdeThread [protected] |
parambool useOsgThread [protected] |
parambool useQMPThreads [protected] |
bool verboseColorLoading [protected] |
osg::ref_ptr<VideoStream> videostream [protected] |
paramint windowHeight [protected] |
std::string windowName [protected] |
paramint windowWidth [protected] |
The documentation for this class was generated from the following files:
