Base Class Reference
#include <base.h>
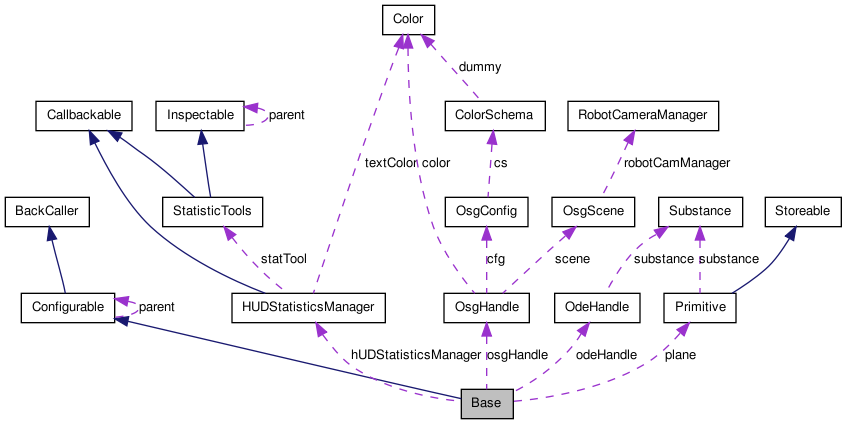
Inherits Configurable.
Inherited by Simulation.
Public Member Functions | |
| Base (const std::string &caption="LpzRobots Simulator (Martius et al)") | |
| virtual void | makePhysicsScene () |
| create the ground plane | |
| virtual void | makeScene (OsgScene *scene, const OsgConfig &config) |
| creates the base scene graph with world, sky and floor and shadow and HUD and stores it in scene | |
| virtual osg::Node * | makeSky (const OsgConfig &config) |
| virtual osg::Node * | makeGround (const OsgConfig &config) |
| virtual osg::Node * | createHUD (OsgScene *scene, const OsgConfig &config) |
| creates hud and is supposed to return the camera to it and adds the geode of the hud to the scene | |
| virtual void | createHUDManager (osg::Geode *geode, osgText::Font *font) |
| virtual void | makeLights (osg::Group *node, const OsgConfig &config) |
| adds light to the node | |
| virtual osgShadow::ShadowedScene * | createShadowedScene (osg::Node *sceneToShadow, osg::LightSource *lightSource, int shadowType) |
| Shadow types: 1 - ShadowVolume 2 - ShadowTextue 3 - ParallelSplitShadowMap 4 - SoftShadowMap 5 - ShadowMap. | |
| virtual void | setGroundTexture (const char *filename) |
| virtual void | setCaption (const std::string &caption) |
| sets the cpation that is printed at the right of the status line | |
| virtual void | setTitle (const std::string &title) |
| sets the title that is printed in the center of the status line | |
| virtual HUDStatisticsManager * | getHUDSM () |
| Create HUDStatisticsManager and register it for being called back every step. | |
| virtual | ~Base () |
Static Public Member Functions | |
| static int | contains (char **list, int len, const char *str) |
| returns the index+1 if the list contains the given string or 0 if not | |
Static Public Attributes | |
| static const int | PHYSICS_CALLBACKABLE = 1 |
| called each ode/physics step | |
| static const int | GRAPHICS_CALLBACKABLE = 2 |
| called each osg/draw step | |
Protected Member Functions | |
| virtual void | setTimeStats (double time, double realtimefactor, double truerealtimefactor, bool pause) |
| virtual void | changeShadowTechnique () |
| Changes the currently used shadow technique. | |
| virtual void | base_close () |
| deletes the stuff that is created on makescene and the like | |
Protected Attributes | |
| dGeomID | ground |
| OsgHandle | osgHandle |
| OdeHandle | odeHandle |
| std::string | caption |
| std::string | title |
| std::string | groundTexture |
| osg::Group * | dummy |
| osg::Node * | hud |
| osgText::Text * | timestats |
| osgText::Text * | captionline |
| osgText::Text * | titleline |
| Primitive * | plane |
| HUDStatisticsManager * | hUDStatisticsManager |
| this manager provides methods for displaying statistics on the graphical window! | |
| int | ReceivesShadowTraversalMask |
| int | CastsShadowTraversalMask |
| int | shadowTexSize |
| bool | useNVidia |
Constructor & Destructor Documentation
| Base | ( | const std::string & | caption = "LpzRobots Simulator (Martius et al)" |
) |
| ~Base | ( | ) | [virtual] |
Member Function Documentation
| void base_close | ( | ) | [protected, virtual] |
deletes the stuff that is created on makescene and the like
| void changeShadowTechnique | ( | ) | [protected, virtual] |
Changes the currently used shadow technique.
The switch is realized between: 0 - NoShadow 3 - ParallelSplitShadowMap 4 - SoftShadowMap 5 - ShadowMap (simple) Currently not supported by this function: 1 - ShadowVolume 2 - ShadowTextue
| int contains | ( | char ** | list, | |
| int | len, | |||
| const char * | str | |||
| ) | [static] |
returns the index+1 if the list contains the given string or 0 if not
creates hud and is supposed to return the camera to it and adds the geode of the hud to the scene
| void createHUDManager | ( | osg::Geode * | geode, | |
| osgText::Font * | font | |||
| ) | [virtual] |
| virtual osgShadow::ShadowedScene* createShadowedScene | ( | osg::Node * | sceneToShadow, | |
| osg::LightSource * | lightSource, | |||
| int | shadowType | |||
| ) | [virtual] |
Shadow types: 1 - ShadowVolume 2 - ShadowTextue 3 - ParallelSplitShadowMap 4 - SoftShadowMap 5 - ShadowMap.
| HUDStatisticsManager * getHUDSM | ( | ) | [virtual] |
Create HUDStatisticsManager and register it for being called back every step.
But do not display if the system is initialised with -nographics.
- Returns:
- the actual HUDStatisticsManager
| Node * makeGround | ( | const OsgConfig & | config | ) | [virtual] |
| void makeLights | ( | osg::Group * | node, | |
| const OsgConfig & | config | |||
| ) | [virtual] |
adds light to the node
| void makePhysicsScene | ( | ) | [virtual] |
create the ground plane
creates the base scene graph with world, sky and floor and shadow and HUD and stores it in scene
| Node * makeSky | ( | const OsgConfig & | config | ) | [virtual] |
| void setCaption | ( | const std::string & | caption | ) | [virtual] |
sets the cpation that is printed at the right of the status line
| virtual void setGroundTexture | ( | const char * | filename | ) | [inline, virtual] |
| void setTimeStats | ( | double | time, | |
| double | realtimefactor, | |||
| double | truerealtimefactor, | |||
| bool | pause | |||
| ) | [protected, virtual] |
| void setTitle | ( | const std::string & | title | ) | [virtual] |
sets the title that is printed in the center of the status line
Member Data Documentation
std::string caption [protected] |
osgText::Text* captionline [protected] |
int CastsShadowTraversalMask [protected] |
osg::Group* dummy [protected] |
const int GRAPHICS_CALLBACKABLE = 2 [static] |
called each osg/draw step
dGeomID ground [protected] |
std::string groundTexture [protected] |
osg::Node* hud [protected] |
HUDStatisticsManager* hUDStatisticsManager [protected] |
this manager provides methods for displaying statistics on the graphical window!
- Examples:
- template_sphererobot/main.cpp.
- Examples:
- template_sphererobot/main.cpp.
const int PHYSICS_CALLBACKABLE = 1 [static] |
called each ode/physics step
int ReceivesShadowTraversalMask [protected] |
int shadowTexSize [protected] |
osgText::Text* timestats [protected] |
std::string title [protected] |
osgText::Text* titleline [protected] |
bool useNVidia [protected] |
The documentation for this class was generated from the following files:
