AmosII Class Reference
#include <amosII.h>
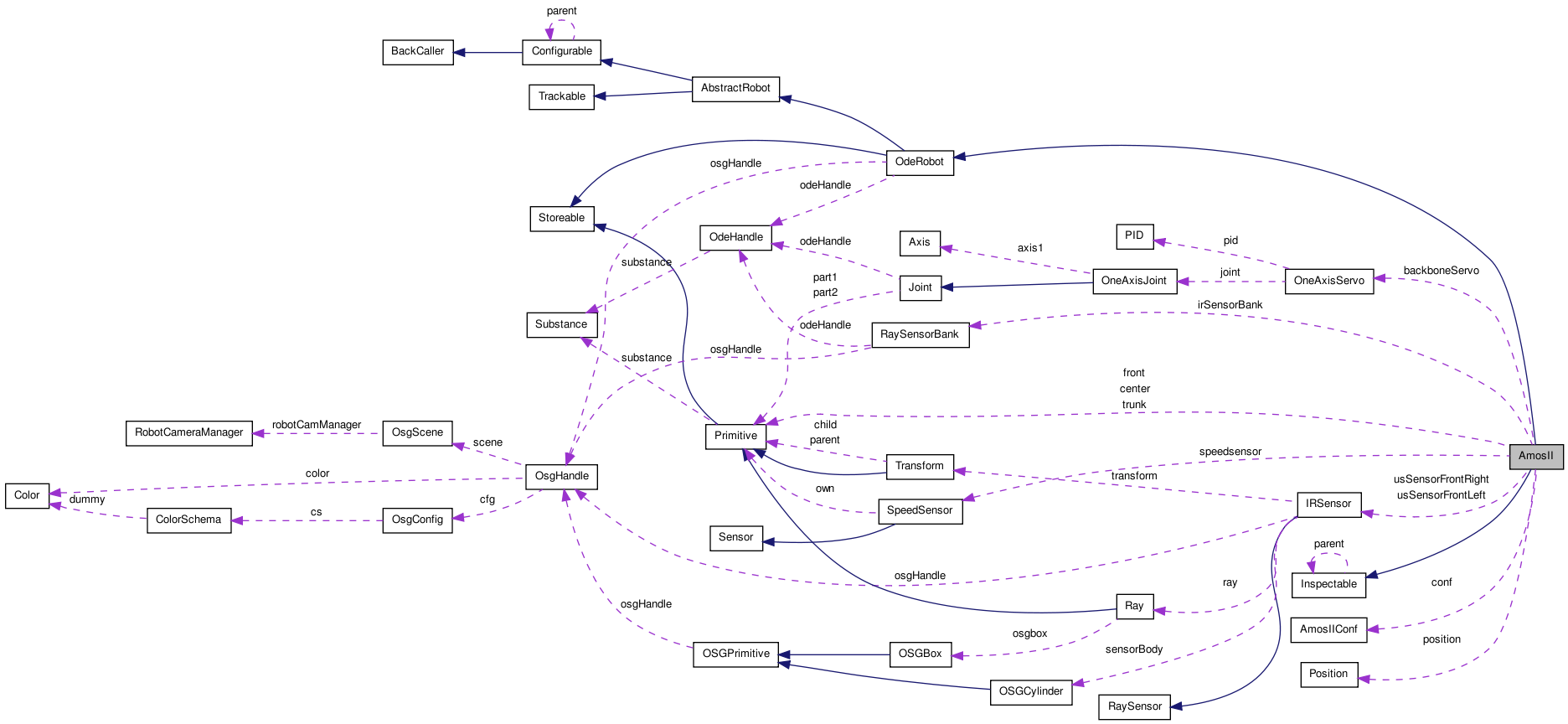
Inherits lpzrobots::OdeRobot, and Inspectable.
Classes | |
| struct | Leg |
Public Types | |
| enum | LegPos { L0, L1, L2, R0, R1, R2, LEG_POS_MAX } |
| enum | LegPosUsage { LEG, WHEEL, UNUSED } |
| enum | LegJointType { TC, CTR, FTI, LEG_JOINT_TYPE_MAX } |
| typedef AmosIIMotorNames | MotorName |
| typedef AmosIISensorNames | SensorName |
Public Member Functions | |
| AmosII (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const AmosIIConf &conf=getDefaultConf(), const std::string &name="AmosII robot") | |
| constructor | |
| virtual | ~AmosII () |
| virtual void | update () |
| updates the OSG nodes of the vehicle | |
| virtual void | place (const osg::Matrix &pose) |
| sets the pose of the vehicle | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| returns actual sensorvalues | |
| virtual void | setMotors (const motor *motors, int motornumber) |
| sets actual motorcommands | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual void | doInternalStuff (GlobalData &globalData) |
| this function is called in each timestep. | |
| virtual double | getMassOfRobot () |
| void | setLegPosUsage (LegPos leg, LegPosUsage usage) |
| virtual bool | setParam (const paramkey &key, paramval val) |
| virtual Primitive * | getMainPrimitive () const |
| the main object of the robot, which is used for position and speed tracking | |
Static Public Member Functions | |
| static AmosIIConf | getDefaultConf (double _scale=1.0, bool _useShoulder=1, bool _useFoot=1, bool _useBack=0) |
| Returns the default configuration values. | |
| static AmosIIConf | getAmosIIv1Conf (double _scale=1.0, bool _useShoulder=1, bool _useFoot=1, bool _useBack=0) |
| static AmosIIConf | getAmosIIv2Conf (double _scale=1.0, bool _useShoulder=1, bool _useFoot=1, bool _useBack=0) |
| static MotorName | getMotorName (LegPos leg, LegJointType joint) |
| returns the MotorName enum value for the given joint at the given leg. | |
| static LegJointType | getLegJointType (MotorName) |
| Returns the joint type of the given motor. | |
| static LegPos | getMotorLegPos (MotorName) |
| Returns the leg of the given motor. | |
Protected Member Functions | |
| virtual void | create (const osg::Matrix &pose) |
| creates vehicle at desired pose | |
| virtual void | destroy () |
| destroys vehicle and space | |
| void | nameMotor (const int motorNo, const char *name) |
| Assign a human readable name to a motor. | |
| void | nameSensor (const int sensorNo, const char *name) |
| Assign a human readable name to a sensor. | |
Member Typedef Documentation
| typedef AmosIIMotorNames MotorName |
| typedef AmosIISensorNames SensorName |
Member Enumeration Documentation
| enum LegJointType |
| enum LegPos |
| enum LegPosUsage |
Constructor & Destructor Documentation
| AmosII | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const AmosIIConf & | conf = getDefaultConf(), |
|||
| const std::string & | name = "AmosII robot" | |||
| ) |
constructor
- Parameters:
-
odeHandle data structure for accessing ODE osgHandle ata structure for accessing OSG conf configuration object name name to display for this robot
| ~AmosII | ( | ) | [virtual] |
Member Function Documentation
| void create | ( | const osg::Matrix & | pose | ) | [protected, virtual] |
creates vehicle at desired pose
creates vehicle at desired position
- Parameters:
-
pose 4x4 pose matrix pos struct Position with desired position
central position of the trunk
parameters are set later
parameters are set later
parameters are set later
| void destroy | ( | ) | [protected, virtual] |
destroys vehicle and space
| void doInternalStuff | ( | GlobalData & | global | ) | [virtual] |
this function is called in each timestep.
It should perform robot-internal checks,like space-internal collision detection, sensor resets/update etc.
- Parameters:
-
globalData structure that contains global data from the simulation environment
It should perform robot- internal checks, like space-internal collision detection, sensor resets/update etc.
- Parameters:
-
global structure that contains global data from the simulation environment
Reimplemented from OdeRobot.
| AmosIIConf getAmosIIv1Conf | ( | double | _scale = 1.0, |
|
| bool | _useShoulder = 1, |
|||
| bool | _useFoot = 1, |
|||
| bool | _useBack = 0 | |||
| ) | [static] |
| AmosIIConf getAmosIIv2Conf | ( | double | _scale = 1.0, |
|
| bool | _useShoulder = 1, |
|||
| bool | _useFoot = 1, |
|||
| bool | _useBack = 0 | |||
| ) | [static] |
| AmosIIConf getDefaultConf | ( | double | _scale = 1.0, |
|
| bool | _useShoulder = 1, |
|||
| bool | _useFoot = 1, |
|||
| bool | _useBack = 0 | |||
| ) | [static] |
Returns the default configuration values.
| AmosII::LegJointType getLegJointType | ( | MotorName | name | ) | [static] |
Returns the joint type of the given motor.
returns the joint type of the given motor.
If the given motor name is not associated with a leg joint JOINT_TYPE_MAX is returend and a warning is given out.
- Parameters:
-
MotorName name of the motor
- Returns:
- joint type controlled by this motor or JOINT_TYPE_MAX if MotorName is invalid
| Primitive * getMainPrimitive | ( | ) | const [virtual] |
the main object of the robot, which is used for position and speed tracking
Reimplemented from OdeRobot.
| double getMassOfRobot | ( | ) | [virtual] |
| AmosII::LegPos getMotorLegPos | ( | MotorName | name | ) | [static] |
Returns the leg of the given motor.
If the given motor name is not associated wit a leg LEG_POS_MAX is returned and a warning is given out.
- Parameters:
-
MotorName name of the motor
- Returns:
- the leg on which this motor operates or LEG_POS_MAX if MotorName is invalid
If the given motor name is not associated wit a leg LEG_POS_MAX is returned and a warning is given out
- Parameters:
-
MotorName name of the motor
- Returns:
- the leg on which this motor operates or LEG_POS_MAX if MotorName is invalid
| AmosII::MotorName getMotorName | ( | LegPos | leg, | |
| LegJointType | joint | |||
| ) | [static] |
returns the MotorName enum value for the given joint at the given leg.
If the value for leg or joint are not valid AMOSII_MOTOR_MAX is returned.
- Parameters:
-
leg leg position joint leg joint type
- Returns:
- the motor name value or AMOSII_MOTOR_MAX if parameters are invalid
| int getMotorNumber | ( | ) | [virtual] |
returns number of motors
Implements AbstractRobot.
| int getSensorNumber | ( | ) | [virtual] |
returns number of sensors
Implements AbstractRobot.
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
returns actual sensorvalues
- Parameters:
-
sensors sensor array with sensors scaled to [-1,1] sensornumber length of the sensor array
- Returns:
- number of actually written sensors
Implements AbstractRobot.
| void nameMotor | ( | const int | motorNo, | |
| const char * | name | |||
| ) | [protected] |
Assign a human readable name to a motor.
This name is used for the associated inspectable value as used e.g. in guilogger.
- Parameters:
-
motorNo index of the motor (for standard motors defined by the MotorName enum) name human readable name for the motor
| void nameSensor | ( | const int | sensorNo, | |
| const char * | name | |||
| ) | [protected] |
Assign a human readable name to a sensor.
This name is used for the associated inspectable value as used e.g. in guilogger.
- Parameters:
-
motorNo index of the motor (for standard motors defined by the SensorName enum) name human readable name for the sensor
| void place | ( | const osg::Matrix & | pose | ) | [virtual] |
| void setLegPosUsage | ( | LegPos | leg, | |
| LegPosUsage | usage | |||
| ) |
| void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [virtual] |
sets actual motorcommands
- Parameters:
-
motors motors scaled to [-1,1] motornumber length of the motor array
Implements AbstractRobot.
| void update | ( | ) | [virtual] |
The documentation for this class was generated from the following files:
