|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include "oderobot.h"#include "raysensorbank.h"#include "primitive.h"#include <selforg/inspectable.h>#include <ode_robots/contactsensor.h>#include <ode_robots/torquesensor.h>#include "ashigarusensormotordefinition.h"#include <ode_robots/joint.h>#include <ode_robots/oneaxisservo.h>#include <ode_robots/twoaxisservo.h>#include <ode_robots/spring.h>#include "osgprimitive.h"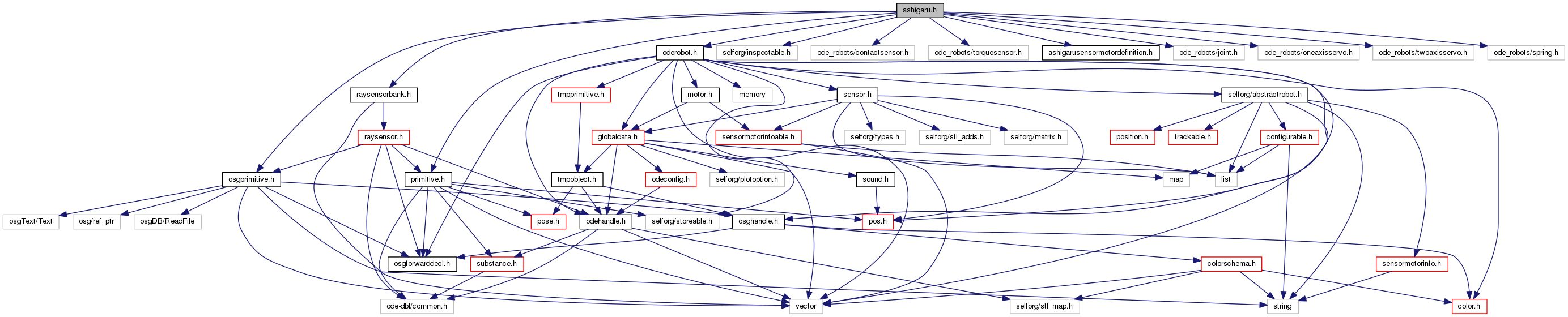
Go to the source code of this file.
Classes | |
| class | ImpTransform |
| class | Ashigaru |
| Robot ASHIGARU :-) 3 legged robot which could be easily connected each other. More... | |
| struct | Ashigaru::Leg |
| Leg struct. More... | |
| struct | Ashigaru::Trunk |
| Trunk struct. More... | |
Namespaces | |
| lpzrobots | |
| forward declarations | |
 1.8.6
1.8.6 
