|
Public Member Functions |
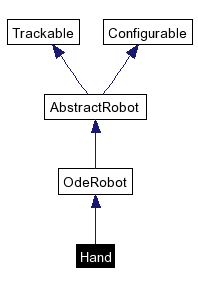
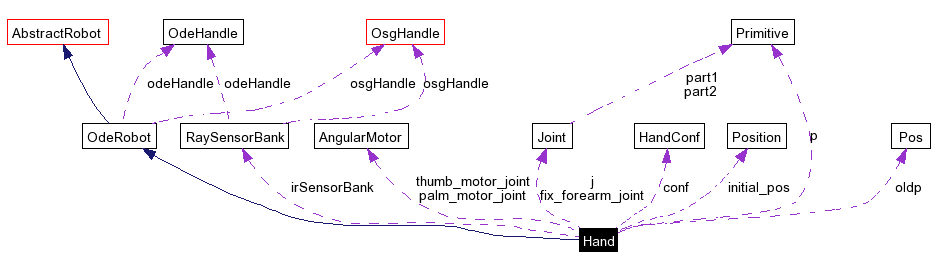
| | Hand (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const HandConf &conf, const std::string &name) |
| | Constructor.
|
| virtual void | update () |
| | update the subcomponents
|
| virtual void | place (const osg::Matrix &pose) |
| | sets the pose of the vehicle
|
| virtual bool | collisionCallback (void *data, dGeomID o1, dGeomID o2) |
| | checks for internal collisions and treats them.
|
| virtual void | doInternalStuff (const GlobalData &globalData) |
| | this function is called in each timestep.
|
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| | returns actual sensorvalues
|
| virtual void | setMotors (const motor *motors, int motornumber) |
| | sets actual motorcommands
|
| virtual int | getSensorNumber () |
| | returns number of sensors
|
| virtual int | getMotorNumber () |
| | returns number of motors
|
| virtual paramlist | getParamList () const |
| | The list of all parameters with there value as allocated lists.
|
| virtual paramval | getParam (const paramkey &key) const |
| | returns the value of the requested parameter or 0 (+ error message to stderr) if unknown.
|
| virtual bool | setParam (const paramkey &key, paramval val) |
| | sets the value of the given parameter or does nothing if unknown.
|
Static Public Member Functions |
| HandConf | getDefaultConf () |
Static Public Attributes |
| double | palm_torque |
| double | finger_force |
Protected Member Functions |
| virtual Primitive * | getMainPrimitive () const |
| | the main object of the robot, which is used for position and speed tracking
|
Protected Attributes |
| HandConf | conf |
| std::vector< Primitive * > | objects |
| std::vector< OSGPrimitive * > | osg_objects |
| std::vector< IRSensor * > | ir_sensors |
| bool | contact_joint_created |
| std::vector< Joint * > | joints |
| std::vector< AngularMotor * > | frictionmotors |
| std::vector< HingeServo * > | servos |
| RaySensorBank | irSensorBank |
| Primitive * | p |
| Joint * | j |
| dSpaceID | hand_space |
| AngularMotor * | palm_motor_joint |
| AngularMotor * | thumb_motor_joint |
| Joint * | fix_forearm_joint |
| double | thumb1 |
| double | thumb2 |
| double | thumb3 |
| GripMode | gripmode |
| Position | initial_pos |
| int | NUM |
| double | MASS |
| double | RADIUS |
| Pos | oldp |
| int | sensorno |
| int | motorno |
| int | sensor_number |
| paramval | factorForce |
| paramval | frictionGround |
| double | velocity |
| double | power |
Private Member Functions |
| virtual void | create (const osg::Matrix &pose) |
| | returns a vector with the positions of all segments of the robot
|
| virtual void | destroy () |
| | destroys robot
|
Static Private Member Functions |
| void | mycallback (void *data, dGeomID o1, dGeomID o2) |
Private Attributes |
| bool | created |
 1.3.8
1.3.8