#include <abstractrobot.h>
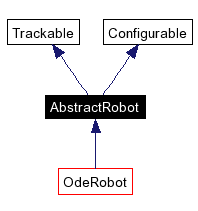
Inherits Trackable, and Configurable.
Inherited by OdeRobot.
Inheritance diagram for AbstractRobot:
Public Member Functions | |
| AbstractRobot (const std::string &name="abstractRobot", const std::string &revision="$ID$") | |
| Constructor. | |
| virtual | ~AbstractRobot () |
| virtual int | getSensors (sensor *sensors, int sensornumber)=0 |
| returns actual sensorvalues | |
| virtual void | setMotors (const motor *motors, int motornumber)=0 |
| sets actual motorcommands | |
| virtual int | getSensorNumber ()=0 |
| returns number of sensors | |
| virtual int | getMotorNumber ()=0 |
| returns number of motors | |
integration/main.cpp, and main.cpp.
|
||||||||||||
|
Constructor.
|
|
|
|
|
|
returns number of motors
Implemented in Arm2Segm, AtomComponent, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, ForcedSphere, Formel1, HurlingSnake, MuscledArm, Nimm2, Nimm4, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, Wheelie, and Hand.
|
|
|
returns number of sensors
Implemented in Arm2Segm, AtomComponent, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, ForcedSphere, Formel1, HurlingSnake, MuscledArm, Nimm2, Nimm4, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, Wheelie, and Hand.
|
|
||||||||||||
|
returns actual sensorvalues
Implemented in Arm2Segm, AtomComponent, Barrel2Masses, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, ForcedSphere, Formel1, HurlingSnake, MuscledArm, Nimm2, Nimm4, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, Wheelie, and Hand.
|
|
||||||||||||
|
sets actual motorcommands
Implemented in Arm2Segm, AtomComponent, CaterPillar, Component, DefaultCaterPillar, DefaultWheelie, ForcedSphere, Formel1, HurlingSnake, MuscledArm, Nimm2, Nimm4, RobotComponent, Schlange, SchlangeForce, SchlangeServo, SchlangeServo2, SchlangeVelocity, ShortCircuit, SliderWheelie, Sphererobot, Sphererobot3Masses, TruckMesh, Uwo, Wheelie, and Hand.
|
 1.3.8
1.3.8