#include <component.h>
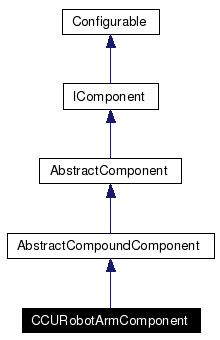
Inheritance diagram for CCURobotArmComponent:
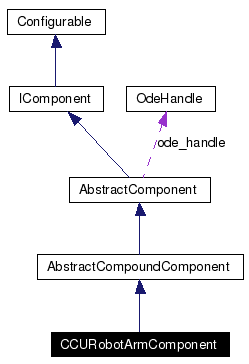
creates a robot arm, based on a RobotArmDescription
sub components are the motors
CCU = Capped Cyliner Universal (joint)
Definition at line 376 of file component.h.
Public Member Functions | |
| CCURobotArmComponent (const RobotArmDescription &r_desc) | |
| virtual | ~CCURobotArmComponent () |
| const IComponent * | does_contain_geom (const dGeomID geom_id, bool b_recursive) const |
| void | draw () const |
| bool | collision_callback (OdeHandle *p_ode_handle, dGeomID geom_id_0, dGeomID geom_id_1) const |
Protected Attributes | |
| dJointGroupID | joint_group_id |
|
|
|
|
|
|
|
||||||||||||||||
|
Implements IComponent. |
|
||||||||||||
|
Reimplemented from AbstractCompoundComponent. |
|
|
Reimplemented from AbstractCompoundComponent. |
|
|
Definition at line 379 of file component.h. |
 1.4.5
1.4.5