#include <one2onewiring.h>
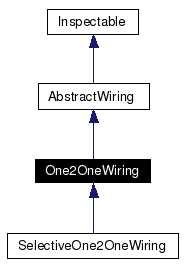
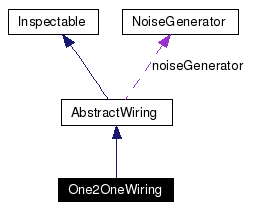
Inheritance diagram for One2OneWiring:
Definition at line 63 of file one2onewiring.h.
Public Member Functions | |
| One2OneWiring (NoiseGenerator *noise, bool plotNoise=false) | |
| constructor | |
| virtual | ~One2OneWiring () |
| destructor | |
| virtual bool | init (int robotsensornumber, int robotmotornumber) |
| initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side | |
| virtual bool | wireSensors (const sensor *rsensors, int rsensornumber, sensor *csensors, int csensornumber, double noise) |
| Realizes one to one wiring from robot sensors to controller sensors. | |
| virtual bool | wireMotors (motor *rmotors, int rmotornumber, const motor *cmotors, int cmotornumber) |
| Realizes one to one wiring from controller motor outputs to robot motors. | |
| virtual list< iparamkey > | getInternalParamNames () const |
| Returns the list of the names of all internal parameters. | |
| virtual list< iparamval > | getInternalParams () const |
| The list of the values of all internal parameters given by getInternalParams(). | |
Protected Attributes | |
| bool | plotNoise |
| TRUE for plotting noise values, FALSE for not plotting. | |
| sensor * | noisevals |
| for storing the noise values | |
|
||||||||||||
|
constructor
Definition at line 60 of file one2onewiring.cpp. |
|
|
destructor
Definition at line 65 of file one2onewiring.cpp. |
|
|
Returns the list of the names of all internal parameters.
Reimplemented from AbstractWiring. Definition at line 124 of file one2onewiring.cpp. |
|
|
The list of the values of all internal parameters given by getInternalParams(). (in the order given by getInternalParamNames()) Reimplemented from AbstractWiring. Definition at line 139 of file one2onewiring.cpp. |
|
||||||||||||
|
initializes the number of sensors and motors on robot side, calculate number of sensors and motors on controller side
Implements AbstractWiring. Reimplemented in SelectiveOne2OneWiring. Definition at line 72 of file one2onewiring.cpp. |
|
||||||||||||||||||||
|
Realizes one to one wiring from controller motor outputs to robot motors.
Implements AbstractWiring. Definition at line 112 of file one2onewiring.cpp. |
|
||||||||||||||||||||||||
|
Realizes one to one wiring from robot sensors to controller sensors.
Implements AbstractWiring. Reimplemented in SelectiveOne2OneWiring. Definition at line 91 of file one2onewiring.cpp. |
|
|
for storing the noise values
Definition at line 115 of file one2onewiring.h. |
|
|
TRUE for plotting noise values, FALSE for not plotting.
Definition at line 113 of file one2onewiring.h. |
 1.4.5
1.4.5