#include <osg/Notify>
#include "cameramanipulatorRace.h"
#include "mathutils.h"
#include "pos.h"
#include <stdio.h>
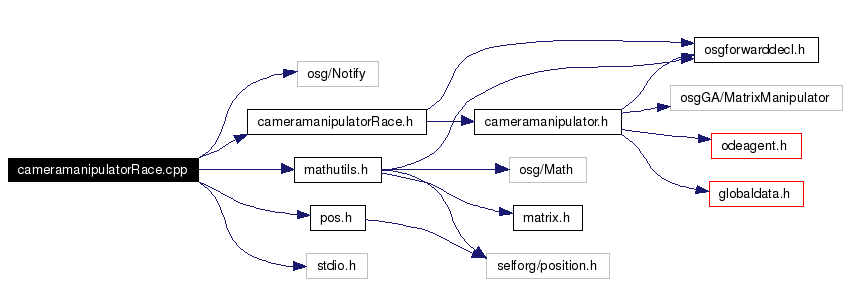
Include dependency graph for cameramanipulatorRace.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | lpzrobots |
Defines | |
| #define | square(x) ((x)*(x)) |
|
|
Definition at line 40 of file cameramanipulatorRace.cpp. |
 1.4.5
1.4.5