|
| | RaySensorBank () |
| |
| virtual | ~RaySensorBank () |
| |
| virtual void | setInitData (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const osg::Matrix &pose) override |
| | sets the initial data structures More...
|
| |
| virtual void | init (Primitive *own, Joint *joint=0) override |
| | initialises sensor with a body of robot and optionally with a joint. More...
|
| |
| virtual int | getSensorNumber () const override |
| | returns the number of sensors values produced by this sensor More...
|
| |
| virtual bool | sense (const GlobalData &globaldata) override |
| | performs sense action More...
|
| |
| virtual int | get (sensor *sensors, int length) const override |
| | writes the sensor values (usually in the range [-1,1] ) into the given sensor array and returns the number of sensors written. More...
|
| |
| virtual std::list< sensor > | getList () const override |
| | returns a list of sensor values (usually in the range [-1,1] ) This function should be overloaded. More...
|
| |
| virtual void | update () override |
| | to update any visual appearance More...
|
| |
| virtual unsigned int | registerSensor (RaySensor *raysensor, Primitive *body, const osg::Matrix &pose, float range, RaySensor::rayDrawMode drawMode) |
| | registers a new sensor at the sensor bank. More...
|
| |
| virtual int | size () |
| | returns the number of sensors More...
|
| |
| virtual void | setRange (unsigned int index, float range) |
| | set the range of the specified sensor (index) More...
|
| |
| virtual void | setRange (float range) |
| | set the range of all sensors More...
|
| |
| virtual dSpaceID | getSpaceID () |
| | returns the spaceID of the sensor space More...
|
| |
| virtual void | clear () |
| |
| virtual bool | isInitialized () |
| |
| | PhysicalSensor () |
| |
| virtual | ~PhysicalSensor () |
| |
| virtual void | setPose (const osg::Matrix &pose) |
| | changes the relative pose of the sensor More...
|
| |
| virtual osg::Matrix | getPose () |
| | relative pose of the sensor More...
|
| |
| | Sensor () |
| |
| virtual | ~Sensor () |
| |
virtual std::list
< SensorMotorInfo > | getSensorInfos () const |
| | returns a list of sensor infos ( More...
|
| |
| std::list< sensor > | getListOfArray () const |
| | helper function for performance implementation of list<> get() based on array-get More...
|
| |
| | SensorMotorInfoAble () |
| |
| void | setBaseName (const std::string &basename) |
| |
| void | setBaseInfo (const SensorMotorInfo &baseinfo) |
| |
| SensorMotorInfo | getBaseInfo () |
| |
| void | setNamingFunc (const NamingFunction &func) |
| |
| NamingFunction | getNamingFunc () const |
| |
| void | setNames (const std::vector< std::string > &names) |
| | set names explicitly (basename is anyway suffixed) More...
|
| |
| std::string | getName (int index) const |
| | returns the name of a single item. Typically called from within Sensor and Motor class. More...
|
| |
| std::list< SensorMotorInfo > | getInfos (int number) const |
| | get all infos. More...
|
| |
|
| enum | Dimensions {
X = 1,
Y = 2,
Z = 4,
XY = X | Y,
XZ = X | Z,
YZ = Y | Z,
XYZ = X | Y | Z
} |
| | defines which dimensions should be sensed. The meaning is sensor specific. More...
|
| |
typedef std::function
< std::string(int)> | NamingFunction |
| | function that returns the name given the index More...
|
| |
| static std::list< sensor > | selectrows (const matrix::Matrix &m, short dimensions) |
| | selects the rows specified by dimensions (X->0, Y->1, Z->2) More...
|
| |
| static int | selectrows (sensor *sensors, int length, const matrix::Matrix &m, short dimensions) |
| | selects the rows specified by dimensions (X->0, Y->1, Z->2) More...
|
| |
| static Dimensions | parseSensorDimension (char *str) |
| |
| static std::string | dimensions2String (short dimensions) |
| |
| static std::string | defaultNameing (int index) |
| | the default implementation is for index==0: basename, otherwise basename + (index+1) More...
|
| |
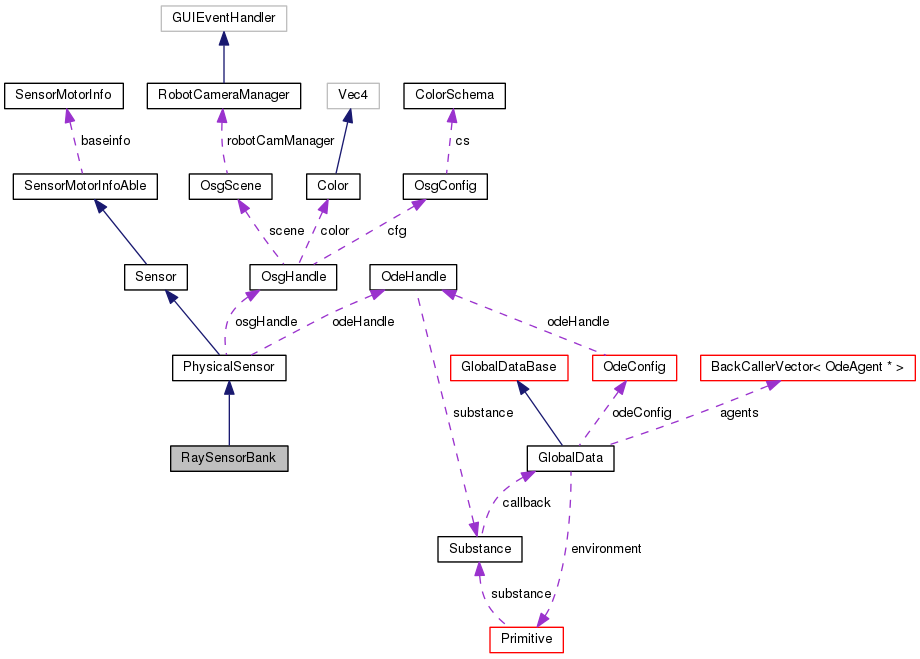
Class for a bank (collection) of ray sensors.
Ray sensors can be registered at the bank. Methods for sensing and reading the sensor values of all sensors are provided.
 Public Member Functions inherited from PhysicalSensor
Public Member Functions inherited from PhysicalSensor 1.8.6
1.8.6 
