|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
#include <joint.h>
Public Member Functions | |
| Joint (Primitive *part1, Primitive *part2, const osg::Vec3 &anchor) | |
| virtual | ~Joint () |
| virtual void | init (const OdeHandle &odeHandle, const OsgHandle &osgHandle, bool withVisual=true, double visualSize=0.2, bool ignoreColl=true) |
| initialises (and creates) the joint. More... | |
| virtual void | update ()=0 |
| should syncronise the Ode stuff and the OSG notes (if any) More... | |
| virtual void | setParam (int parameter, double value)=0 |
| sets the ODE joint parameter (see ODE manual) More... | |
| virtual double | getParam (int parameter) const =0 |
| return the ODE joint parameter (see ODE manual) More... | |
| dJointID | getJoint () const |
| const Primitive * | getPart1 () const |
| Primitive * | getPart1 () |
| const Primitive * | getPart2 () const |
| Primitive * | getPart2 () |
| const osg::Vec3 | getAnchor () const |
| virtual int | getNumberAxes () const =0 |
| returns the number of Axes More... | |
| virtual Axis | getAxis (int n) const |
| returns the n'th axis of the joint (starting with 0) More... | |
| virtual std::list< double > | getPositions () const |
| returns the positions of all Axes More... | |
| virtual std::list< double > | getPositionRates () const |
| returns the position rates of all Axes More... | |
| virtual int | getPositions (double *sensorarray) const |
| stores the positions of all Axes into sensorarray and returns the number of written entries More... | |
| virtual int | getPositionRates (double *sensorarray) const |
| stores the position rates of all Axes into sensorarray and returns the number of written entries More... | |
| virtual void | setFeedBackMode (bool mode) |
| enable or disable the feedback mode More... | |
| virtual bool | getTorqueFeedback (Pos &t1, Pos &t2) const |
| torque applied to body 1 and body 2 More... | |
| virtual bool | getForceFeedback (Pos &f1, Pos &f2) const |
| force applied to body 1 and body 2 More... | |
Static Public Member Functions | |
| static osg::Matrix | anchorAxisPose (const osg::Vec3 &anchor, const Axis &axis) |
Public Attributes | |
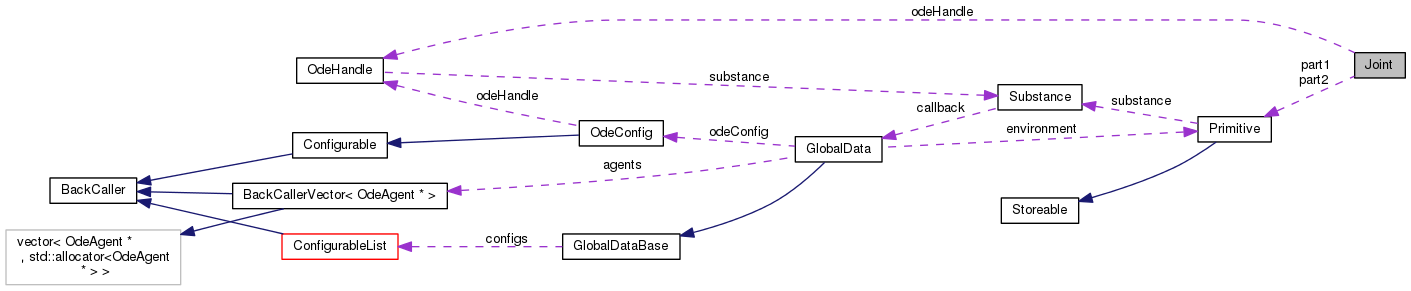
| OdeHandle | odeHandle |
Protected Attributes | |
| dJointID | joint |
| Primitive * | part1 |
| Primitive * | part2 |
| osg::Vec3 | anchor |
| dJointFeedback * | feedback |
|
virtual |
|
inline |
|
inlinevirtual |
returns the n'th axis of the joint (starting with 0)
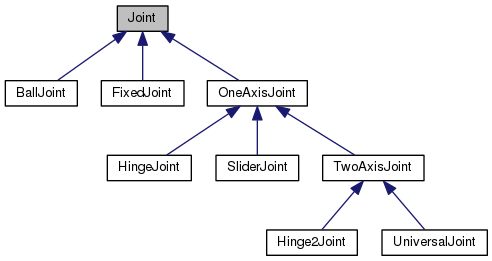
Reimplemented in TwoAxisJoint, and OneAxisJoint.
|
inline |
|
pure virtual |
returns the number of Axes
Implemented in BallJoint, FixedJoint, TwoAxisJoint, and OneAxisJoint.
|
pure virtual |
return the ODE joint parameter (see ODE manual)
Implemented in SliderJoint, BallJoint, UniversalJoint, Hinge2Joint, HingeJoint, and FixedJoint.
|
inline |
|
inline |
|
inline |
|
inline |
|
inlinevirtual |
returns the position rates of all Axes
Reimplemented in TwoAxisJoint, and OneAxisJoint.
|
inlinevirtual |
stores the position rates of all Axes into sensorarray and returns the number of written entries
Reimplemented in TwoAxisJoint, and OneAxisJoint.
|
inlinevirtual |
returns the positions of all Axes
Reimplemented in TwoAxisJoint, and OneAxisJoint.
|
inlinevirtual |
stores the positions of all Axes into sensorarray and returns the number of written entries
Reimplemented in TwoAxisJoint, and OneAxisJoint.
|
virtual |
initialises (and creates) the joint.
If visual is true then the joints is also drawn. visualSize is the size of the visual representation. If ignoreColl is true then the pair of connected parts is ignored at collision handling. The member variable odeHandle is set to the given handle. (To be overloaded, but this init should be called always from children!)
Reimplemented in SliderJoint, BallJoint, UniversalJoint, Hinge2Joint, HingeJoint, and FixedJoint.
|
virtual |
enable or disable the feedback mode
|
pure virtual |
sets the ODE joint parameter (see ODE manual)
Implemented in SliderJoint, BallJoint, UniversalJoint, Hinge2Joint, HingeJoint, and FixedJoint.
|
pure virtual |
should syncronise the Ode stuff and the OSG notes (if any)
Implemented in SliderJoint, BallJoint, UniversalJoint, Hinge2Joint, HingeJoint, and FixedJoint.
|
protected |
|
protected |
|
protected |
| OdeHandle odeHandle |
|
protected |
|
protected |
 1.8.6
1.8.6 
