VierBeiner Class Reference
robot that should look like a dog More...
#include <vierbeiner.h>
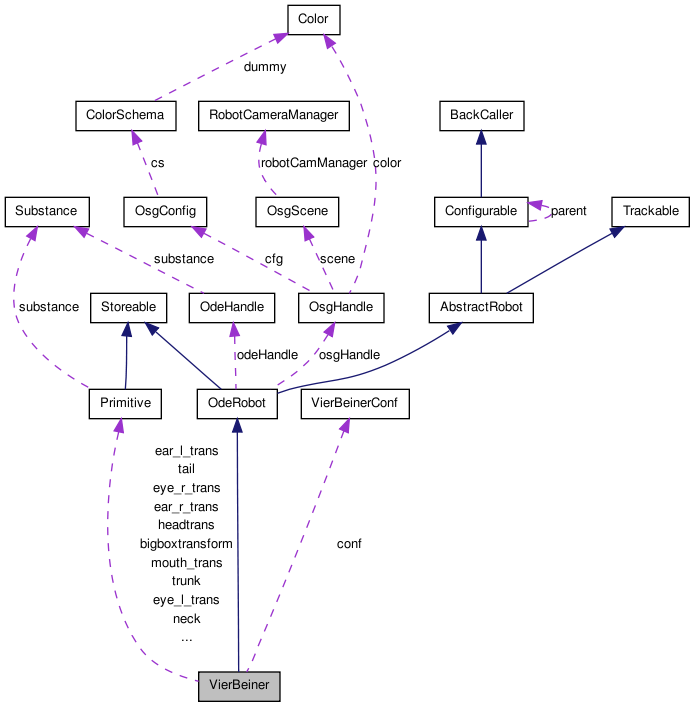
Inherits lpzrobots::OdeRobot.
Public Member Functions | |
| VierBeiner (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const VierBeinerConf &conf, const std::string &name) | |
| constructor of VierBeiner robot | |
| virtual | ~VierBeiner () |
| virtual void | update () |
| updates the OSG nodes of the vehicle | |
| virtual void | place (const osg::Matrix &pose) |
| sets the pose of the vehicle | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| returns actual sensorvalues | |
| virtual void | setMotors (const motor *motors, int motornumber) |
| sets actual motorcommands | |
| virtual int | getSensorNumber () |
| returns number of sensors | |
| virtual int | getMotorNumber () |
| returns number of motors | |
| virtual void | doInternalStuff (GlobalData &globalData) |
| this function is called in each timestep. | |
| virtual void | notifyOnChange (const paramkey &key) |
| Is called when a parameter was changes via setParam(). | |
| virtual Primitive * | getMainPrimitive () const |
| the main object of the robot, which is used for position and speed tracking | |
Static Public Member Functions | |
| static VierBeinerConf | getDefaultConf () |
Protected Member Functions | |
| virtual void | create (const osg::Matrix &pose) |
| creates vehicle at desired pose | |
| virtual void | destroy () |
| destroys vehicle and space | |
Protected Attributes | |
| VierBeinerConf | conf |
| double | legmass |
| bool | created |
| Primitive * | trunk |
| Primitive * | headtrans |
| Primitive * | bigboxtransform |
| Primitive * | neck |
| Primitive * | tail |
| Primitive * | eye_r_trans |
| Primitive * | eye_l_trans |
| Primitive * | ear_l_trans |
| Primitive * | ear_r_trans |
| Primitive * | mouth_trans |
| std::vector< OneAxisServo * > | hipservos |
| std::vector< OneAxisServo * > | kneeservos |
| std::vector< OneAxisServo * > | ankleservos |
| std::vector< OneAxisServo * > | headtailservos |
| std::list< Primitive * > | legparts |
Detailed Description
robot that should look like a dog
sensors/motors: 0: neck, 1: tail 2,3,4,5 : hip: rh, lh, rf, lf 6,7,8,9 : knee: rh, lh, rf, lf 10,11 : ankle rh, lh
Constructor & Destructor Documentation
| VierBeiner | ( | const OdeHandle & | odeHandle, | |
| const OsgHandle & | osgHandle, | |||
| const VierBeinerConf & | conf, | |||
| const std::string & | name | |||
| ) |
constructor of VierBeiner robot
- Parameters:
-
odeHandle data structure for accessing ODE osgHandle ata structure for accessing OSG conf configuration object
| virtual ~VierBeiner | ( | ) | [inline, virtual] |
Member Function Documentation
| void create | ( | const osg::Matrix & | pose | ) | [protected, virtual] |
creates vehicle at desired pose
creates vehicle at desired position
- Parameters:
-
pose 4x4 pose matrix pos struct Position with desired position
ignore collision between box on top of dog and head and also between head and body
ignore collision between box on top of dog and tail
| void destroy | ( | ) | [protected, virtual] |
destroys vehicle and space
| void doInternalStuff | ( | GlobalData & | global | ) | [virtual] |
this function is called in each timestep.
It should perform robot-internal checks, like space-internal collision detection, sensor resets/update etc.
- Parameters:
-
globalData structure that contains global data from the simulation environment
It should perform robot-internal checks, like space-internal collision detection, sensor resets/update etc.
- Parameters:
-
global structure that contains global data from the simulation environment
Reimplemented from OdeRobot.
| static VierBeinerConf getDefaultConf | ( | ) | [inline, static] |
| virtual Primitive* getMainPrimitive | ( | ) | const [inline, virtual] |
the main object of the robot, which is used for position and speed tracking
Reimplemented from OdeRobot.
| int getMotorNumber | ( | ) | [virtual] |
returns number of motors
Implements AbstractRobot.
| int getSensorNumber | ( | ) | [virtual] |
returns number of sensors
Implements AbstractRobot.
| int getSensors | ( | sensor * | sensors, | |
| int | sensornumber | |||
| ) | [virtual] |
returns actual sensorvalues
- Parameters:
-
sensors sensors scaled to [-1,1] sensornumber length of the sensor array
- Returns:
- number of actually written sensors
Implements AbstractRobot.
| void notifyOnChange | ( | const paramkey & | key | ) | [virtual] |
Is called when a parameter was changes via setParam().
Note that it is not called of parameters of childs are changed, then there notifyOnChange() method is called. The key and of the changed parameter (use getParam() to retrieve its actual value). Overload this function when special actions have to be taken on parameter changes.
Reimplemented from Configurable.
| void place | ( | const osg::Matrix & | pose | ) | [virtual] |
| void setMotors | ( | const motor * | motors, | |
| int | motornumber | |||
| ) | [virtual] |
sets actual motorcommands
- Parameters:
-
motors motors scaled to [-1,1] motornumber length of the motor array
set knee servos to set point 0 (spring emulation)
set ankle servos to set point 0 (spring emulation)
Implements AbstractRobot.
| void update | ( | ) | [virtual] |
Member Data Documentation
std::vector<OneAxisServo*> ankleservos [protected] |
Primitive * bigboxtransform [protected] |
VierBeinerConf conf [protected] |
bool created [protected] |
Primitive * ear_l_trans [protected] |
Primitive * ear_r_trans [protected] |
Primitive * eye_l_trans [protected] |
Primitive* eye_r_trans [protected] |
std::vector<OneAxisServo*> headtailservos [protected] |
std::vector<OneAxisServo*> hipservos [protected] |
std::vector<OneAxisServo*> kneeservos [protected] |
double legmass [protected] |
Primitive * mouth_trans [protected] |
The documentation for this class was generated from the following files:
