|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
|
Robot Simulator of the Robotics Group for Self-Organization of Control
0.8.0
|
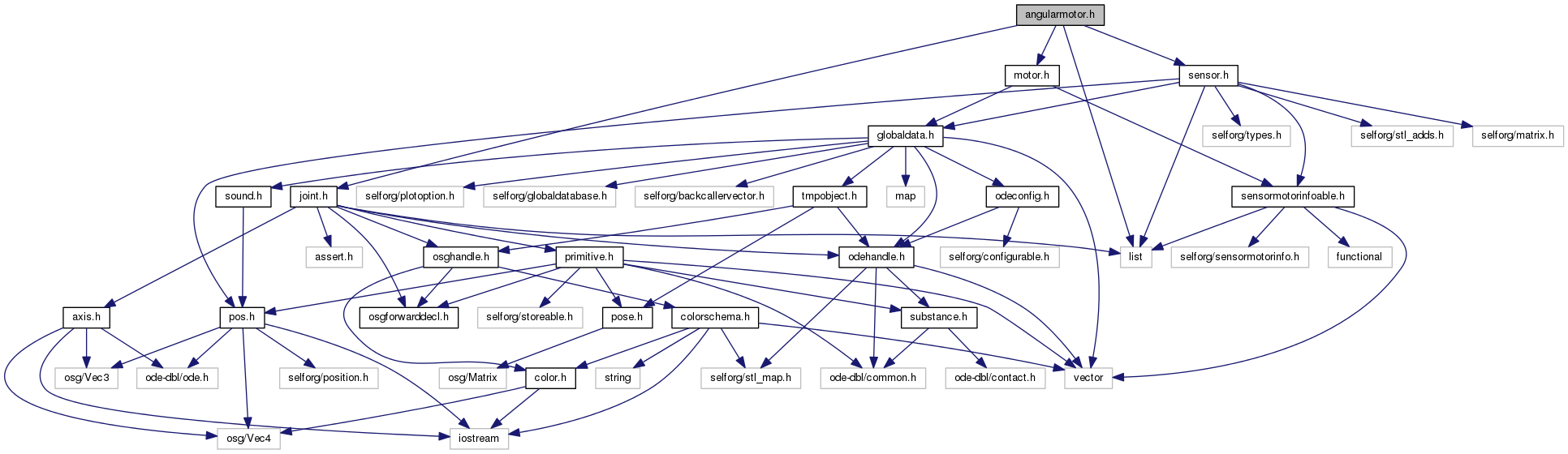

Go to the source code of this file.
Classes | |
| class | AngularMotor |
| Abstract angular motor class. More... | |
| class | AngularMotor1Axis |
| Angular motor for OneAxisJoints. More... | |
| class | AngularMotor2Axis |
| Angular motor for TwoAxisJoints. More... | |
| class | AngularMotor3AxisEuler |
| Angular motor for Ball Joints with Euler control. More... | |
| class | AngularMotorNAxis |
| Angular motor for arbitrary Joints with custom axis (up to 3) More... | |
Namespaces | |
| lpzrobots | |
| forward declarations | |
 1.8.6
1.8.6 
