#include <robotcomponent.h>
Inherits Component.
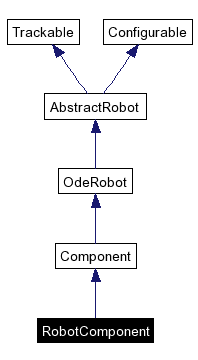
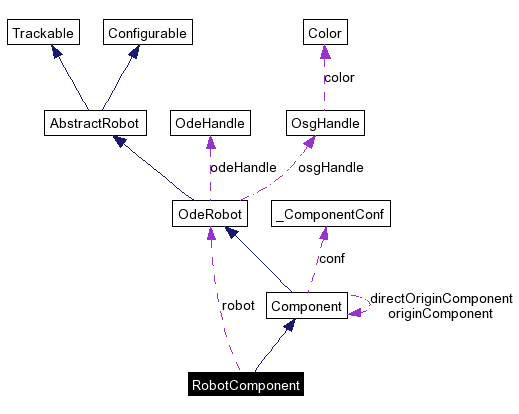
Inheritance diagram for RobotComponent:
Public Member Functions | |
| RobotComponent (const OdeHandle &odeHandle, const OsgHandle &osgHandle, const ComponentConf &conf) | |
| ~RobotComponent () | |
| virtual int | getSensors (sensor *sensors, int sensornumber) |
| Use this, to get all sensor values of all the joints of all subcomponents, and the sensors of all robots, belonging to all subcompionents. | |
| virtual void | setMotors (const motor *motors, int motornumber) |
| Sets the motor values for the joints connecting the component with its subcomponents, an recursivly the joints of all subComponents. | |
| virtual int | getSensorNumber () |
| Returns number of sensors; recursivly adding of the number of sensors all subcomponents and the robots of all Subcomponents. | |
| virtual int | getMotorNumber () |
| returns number of motors; recursivly adding of the number of sensors all subcomponents; at the moment only counts Hinge-, Slider-, Hinge2 and Universal-Joints; The Motor-Numbers of the robots of the Components is not counted. | |
| virtual void | update () |
| update the OSG notes here | |
| virtual void | place (const Pos &pos) |
| sets the vehicle to position pos | |
| virtual void | place (const osg::Matrix &pose) |
| sets the pose of the vehicle | |
| virtual bool | collisionCallback (void *data, dGeomID o1, dGeomID o2) |
| checks for internal collisions and treats them. | |
| virtual void | doInternalStuff (const GlobalData &globalData) |
| this function is called in each timestep. | |
| virtual Position | getPosition () const |
| returns position of the object | |
| virtual osg::Vec3 | getPositionbetweenComponents (Component *component) |
| This is only a simple function, calculating the coordinates of the point exactly between two directly connected components. | |
| virtual bool | setRobot (OdeRobot *newrobot) |
| Sets the reference to the robot for the component, but only if there is no Primitive assigned to the component. | |
| virtual OdeRobot * | getRobot () |
| returns a reference to the robot belonging to the component, if there is no robot it is an NULL pointer, then try getMeinPrimitive, because there is only a solid Primitive not a complex robot for this component | |
| virtual Primitive * | getMainPrimitive () const |
| return reference to the simple Primitive, or to the main Primitive of the robot assigend to the component. | |
Private Attributes | |
| OdeRobot * | robot |
The physical object that belongs to objects of this class is a robot whose class is derived from OdeRobot. The sensor an motor values these component sends and gets could be used to controll the robot that belongs to this component. If this controling method should be used there are two controling parameters that tell the component, how to handle its sensor/motor values. These are the params completemotormode and complete sensormode of the componentConf. These two parameters control if the sensor/motor values will eb send to the robot of the component or not. If thei are not sent to the robot the robot needs its own controller.
|
||||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
checks for internal collisions and treats them. In case of a treatment return true (collision will be ignored by other objects and the default routine) else false (collision is passed to other objects and (if not treated) to the default routine). Reimplemented from Component.
|
|
|
this function is called in each timestep. It should perform robot-internal checks, like space-internal collision detection, sensor resets/update etc.
Reimplemented from Component.
|
|
|
return reference to the simple Primitive, or to the main Primitive of the robot assigend to the component. If nothimng is assigned, NULL is returned. Implements Component.
|
|
|
returns number of motors; recursivly adding of the number of sensors all subcomponents; at the moment only counts Hinge-, Slider-, Hinge2 and Universal-Joints; The Motor-Numbers of the robots of the Components is not counted.
Reimplemented from Component.
|
|
|
returns position of the object
Implements Component.
|
|
|
This is only a simple function, calculating the coordinates of the point exactly between two directly connected components.
Reimplemented from Component.
|
|
|
returns a reference to the robot belonging to the component, if there is no robot it is an NULL pointer, then try getMeinPrimitive, because there is only a solid Primitive not a complex robot for this component
|
|
|
Returns number of sensors; recursivly adding of the number of sensors all subcomponents and the robots of all Subcomponents.
Reimplemented from Component.
|
|
||||||||||||
|
Use this, to get all sensor values of all the joints of all subcomponents, and the sensors of all robots, belonging to all subcompionents. The sensor values have the following sequence: values of the component connecting joints, values of the robot of the component, values of component connecting joints of the first subcomponent, values of the robot of the first subcomponent, ... sensor values of the connecting joints of this component and all subcomponents Reimplemented from Component.
|
|
|
sets the pose of the vehicle
Implements OdeRobot.
|
|
|
sets the vehicle to position pos
Implements Component.
|
|
||||||||||||
|
Sets the motor values for the joints connecting the component with its subcomponents, an recursivly the joints of all subComponents. The motors of all robots of the subcomponents is not set.
Reimplemented from Component.
|
|
|
Sets the reference to the robot for the component, but only if there is no Primitive assigned to the component. Overwriting an existing robot reference is possible, also to set it NULL, and then set a reference to a Primitive with setSimplePrimitive ( .. ). But first the robot reference should be saved elsewhere or it won't be updated graficaly return true if the reference could be set; false else |
|
|
update the OSG notes here
Implements Component.
|
|
|
|
 1.3.8
1.3.8